
现代C++.md 41 KB
现代 C++
基于对象基础
一个类基本包括数据成员(字段) + 函数成员
class Point {
int x;
int y;
static int xx;
void Process() {
// do something
Process2(100);
}
void Process2(int x) {
// do something
}
static void Process3() {
xx++;
}
};
int Point::x = 0;
int main() {
Point pt;
pt.Process();
}
对于编译器来说,它可以这么理解上述代码
struct Point {
int x;
int y;
static int xx;
}
int Point::xx = 0;
void Process(Point* this) {
// do something
this->Process2(100);
}
void Process2(Point* this, int x) {
// do something
}
void Process3() {
Point::xx++;
}
将所有的成员函数都定义为,上述这种普通函数,然后给每个函数额外添加一个 Point* 的参数,用于指向执行该函数的对象
因为 Process3 是一个 static 函数,所以无法访问非 static 的成员属性,这个时候 Process3 就不用添加 Point*
相对来说,使用 C++ 的定义 class 的方法编写代码,可以将行为(函数)和状态(属性)结合起来进行编写
内存对齐
对于下面两个类的定义,虽然属性相同,但是对象内存大小占用却不相同
#pragma pack(8)
class P1 {
char a1;
int x;
char a2;
};
class P2 {
char a1;
char a2;
int x;
};
// sizeof(P1) 12
// sizeof(P2) 8
在 C++ 中存在内存对齐,使用内存对齐可以优化 CPU 存储数据效率、避免数据截断。对按对齐系数(4、8字节)整倍数进行对齐
可以使用
#pragma pack(4)控制对齐大小
- 内存对齐规则
- 成员对齐:每个成员的地址必须是其自身大小或
#pragma pack(n)设置值的较小值的倍数 - 结构体总大小:必须是所有成员中最大对齐值的整数倍
- 填充字节:编译器在成员之间插入空隙(padding),以满足对齐要求
- 成员对齐:每个成员的地址必须是其自身大小或
对于 class P1 来说
- char a1
- 大小:1 字节
- 对齐要求:min(1, 8) = 1
- 地址范围:0
- int x
- 大小:4 字节
- 对齐要求:min(4, 8) = 4
- 起始地址必须是 4 的倍数
- 当前地址是 1,需填充 3 字节(地址 1-3),使 x 从地址 4 开始
- 地址范围:4-7
- char a2
- 大小:1 字节
- 对齐要求:1
- 直接放在 x 后面,地址 8
当前总大小:0-8(共 9 字节)。结构体总大小必须是最大对齐值(4)的整数倍。9 向上取整到最近的 4 的倍数是 12,因此末尾填充 3 字节
最大对齐值:最大对齐值是结构体中所有成员的对齐值中的最大值,成员的对齐值 =
min(成员自身大小, #pragma pack(n) 设置的值)
最终内存布局
| a1 (1) | padding (3) | x (4) | a2 (1) | padding (3) |
对于 class P2 来说
- char a1
- 地址范围:0
- char a2
- 地址范围:1
- int x
- 对齐要求:4
- 当前地址是 2,需填充 2 字节(地址 2-3),使 x 从地址 4 开始
- 地址范围:4-7
当前总大小:0-7(共 8 字节)。8 已经是最大对齐值(4)的整数倍,无需额外填充
最终内存布局
| a1 (1) | a2 (1) | padding (2) | x (4) |
通过对比 P1 和 P2 的内存,可以得到结论:大内存属性放前面,小内存属性放后面
那么,如果在类中添加一个函数,会影响这个对象大小吗?
class Point {
int x;
int y;
void Process() {}
};
// sizeof(Point) 8
通过上面的代码可以发现,sizeof(Point) 的大小还是 8,函数定义并没有增加 Point 的大小
这是因为前面解释过编译器如何理解 C++ 对象的,就是一个数据结构体 + 全局函数
也就是说,Point 对象被解析成了下面这样, Process 被解析成了全局函数,占用的是代码段大小,不影响对象大小
struct Point { int x; int y;};
Process(Point* this)
{
// do something
}
但是,如果是下面定义的对象,又不一样,Point1 对象有一个虚函数 Process2,需要一个指针指向虚函数表,所以 Point1 额外需要一个虚函数指针,因此 sizeof(Point1) 大小是 16
指针的大小根据平台不同,可能是 4,也可能是 8
class Point1 {
int x;
int y;
void Process() {}
virtual void Process2() {}
};
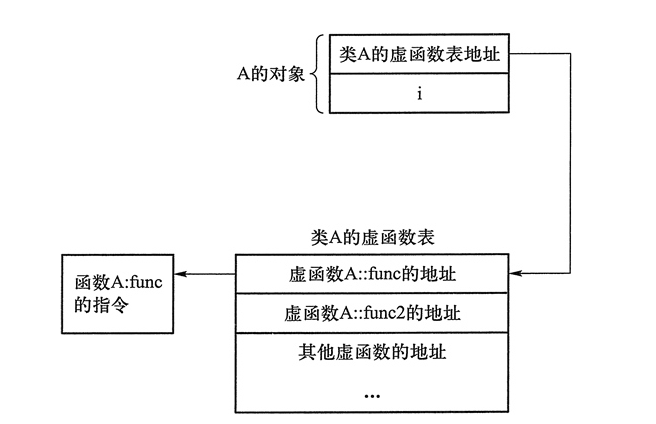
以上图为例,如果一个类有虚函数,那么这个类对象在内存中第一个属性是一个指针,指向这个类的虚函数表
既然知道这个类的第一个属性是一个指针,是否可以通过指针获取到虚函数表,然后获取虚函数表的第一个函数并执行它呢?
tip: 下面的例子可能在 MSVC 中运行失败,因为 MSVC 的虚函数表的第一位存储着 type_info 也就是类的类型信息
#include <iostream>
using namespace std;
class Point1 {
int x;
int y;
virtual void Process2(int InParam) { std::cout << "hello world " << InParam << std::endl; }
};
typedef void(*Fun)(Point1*, int);
int main()
{
auto a = new Point1();
std::cout << sizeof(int) << " " << sizeof(long) << " " << sizeof(void*) << std::endl;
Fun pfun = (Fun)*((long *)*(long *)(a));
pfun(a, 4);
delete a;
return 0;
}
这里使用
long*而不是int*是因为我机器上指针大小是 8 与long的大小相同
通过 *(long *)a 将对象 a 从 Point* 强转成 long*,然后对其取地址,得到虚函数表的首地址
将虚函数表的首地址强转成 long* 并对其取地址,得到第一个虚函数的指针,再将其强转成 void *(int) 的函数指针,就可以执行它
为什么要定义
Fun为void(*)(Point*, int),还记得之前说过编译器如何对 C++ 类的函数做处理的吗?
继承的内存模型
- 单继承的内存结构

- 多继承的内存结构
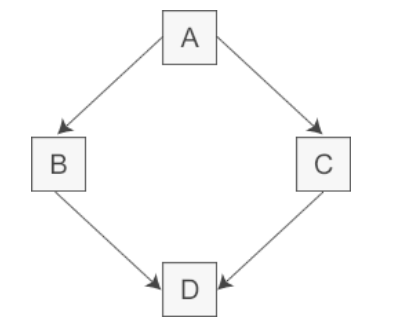
- 菱形继承
#include <iostream>
class Base {
int x;
};
class A : public Base {
int XX;
};
class B : public Base {
int YY;
};
class C : public A, public B {
int ZZ;
};
int main()
{
std::cout << "sizeof(Base) = " << sizeof(Base) << std::endl; // 4
std::cout << "sizeof(A) = " << sizeof(A) << std::endl; // 8
std::cout << "sizeof(B) = " << sizeof(B) << std::endl; // 8
std::cout << "sizeof(C) = " << sizeof(C) << std::endl; // 20
return 0;
}
根据上面的例子,不难发现, 类 C 的大小是两个父类的大小的和 + 自己属性 ZZ 的大小,也就是说 C 中有两份 Base 数据
传统菱形继承存在很多问题,包括命名冲突、冗余数据等
为了解决菱形继承的问题,C++ 提出了 虚继承
class Base {
int x;
};
class A : public virtual Base {
int XX;
};
class B : public virtual Base {
int YY;
};
class C : public A, public B {
int ZZ;
};
这里 Base 就是一个虚基类, 不论虚基类再继承体系中出现多少次,在派生类中只包含一份虚基类的成员
sizeof(Base) // = 4
sizeof(A) // = 16
sizeof(B) // = 16
sizeof(C) // = 40
注意这里 A 和 B 的内存大小,增加了 8 个 字节,也就是一个指针的大小
很明显,虚基类和虚函数一样,增加了个一个指针,指向这个类的虚基类表,同时由于多了一个指针,需要内存对齐,所以 sizeof(A) 的内存大小是 4 + 8 + 4(空白内容)
════════════ Base ════════════
┌───────────┐
│ x │ 4字节
└───────────┘
════════════ A ════════════
┌───────────┬───────────┬───────────┬───────────┐
│ vbase_ptr (8字节) │ XX (4) │ padding (4) │
└───────────┴───────────┴───────────┴───────────┘
════════════ C 的内存布局 ════════════
┌───────────┬───────────┬───────────┬───────────┐ ← A部分
│ A的虚基类指针 │ XX │ padding │
├───────────┼───────────┼───────────┼───────────┤ ← B部分 ← C自身
│ B的虚基类指针 │ YY │ ZZ │
├───────────┼───────────┼───────────┴───────────┤ ← 虚基类Base
│ x │ padding │
└───────────┴───────────┘
此时 C 的内存大小是 Base::x + A::XX + A的虚基类表指针 + B::XX + B的虚基类表指针 + C::ZZ
#include <iostream>
class Base {
public:
int x;
};
class A : public virtual Base {
public:
int XX;
};
class B : public virtual Base {
public:
int YY;
};
class C : public A, public B {
public:
int ZZ;
};
int main()
{
std::cout << "sizeof(Base) " << sizeof(Base) << std::endl;
std::cout << "sizeof(A) " << sizeof(A) << std::endl;
std::cout << "sizeof(B) " << sizeof(B) << std::endl;
std::cout << "sizeof(C) " << sizeof(C) << std::endl;
std::cout << "offsetof ZZ " << offsetof(C, ZZ) << std::endl;
C* c = new C();
std::cout << "XX = " << *(int*)((char*)c + sizeof(void*)) << std::endl;
std::cout << "YY = " << *(int*)((char*)c + sizeof(A) + sizeof(void*)) << std::endl;
std::cout << "x = " << *(int*)((char*)c + sizeof(A) + sizeof(B)) << std::endl;
std::cout << "ZZ = " << *(int*)((char*)c + sizeof(A) + sizeof(void*) + sizeof(int)) << std::endl;
}
Base实例被放在整个对象末尾,通过指针偏移访问
如果此时再加上一个虚函数呢?
这种情况下,虚函数表的指针就不一定在对象的首地址了
#include <iostream>
class Base {
public:
virtual void foo() { std::cout << "hello" << std::endl; }
public:
int x = 1;
};
class A : public virtual Base {
public:
int XX = 2;
};
class B : public virtual Base {
public:
int YY = 3;
};
class C : public A, public B {
public:
int ZZ = 4;
};
typedef void(*fun)(C* a);
int main() {
std::cout << "sizeof(Base) " << sizeof(Base) << std::endl;
std::cout << "sizeof(A) " << sizeof(A) << std::endl;
std::cout << "sizeof(B) " << sizeof(B) << std::endl;
std::cout << "sizeof(C) " << sizeof(C) << std::endl;
std::cout << "offsetof ZZ " << offsetof(C, ZZ) << std::endl;
C* c = new C();
for(int i = 0; i < sizeof(C); i += 4)
{
std::cout << "i = " << i << " value = " << *(int*)((char*)c + i) << std::endl;
}
/*
| 虚基类指针(8字节) | XX(4字节) | 占位(4字节) |
| 虚基类指针(8字节) | YY(4字节) | ZZ (4字节) |
| 虚函数指针(8字节) | x (4字节) | 占位(4字节) |
*/
fun f0 = (fun)(*(long*)*(long*)c);
fun f1 = (fun)(*(long*)*(long*)(((char*)c + 16)));
fun f2 = (fun)(*(long*)*(long*)(((char*)c + 32)));
// f0(c);
// f1(c);
f2(c);
std::cout << "XX = " << *(int*)((char*)c + sizeof(void*)) << std::endl;
std::cout << "YY = " << *(int*)((char*)c + sizeof(void*) * 2 + sizeof(int) * 2) << std::endl;
std::cout << "x = " << *(int*)((char*)c + sizeof(void*) * 3 + sizeof(int) * 4) << std::endl;
std::cout << "ZZ = " << *(int*)((char*)c + sizeof(void*) * 2 + sizeof(int) * 3) << std::endl;
return 0;
}
优化一下虚函数执行的写法,使用 std::uintptr_t 来表示指针大小,使用 vtable[0] 这种数组方式来更加安全的读取函数指针
// 读 vptr(对象开头的第一个指针)
std::uintptr_t vptr = *reinterpret_cast<std::uintptr_t*>(b);
// 把 vptr 当作指向“函数地址数组”的指针
auto vtable = reinterpret_cast<std::uintptr_t const*>(vptr);
// 取前三个虚函数地址并调用
Fn f0 = reinterpret_cast<Fn>(vtable[0]); // A::fun
Fn f1 = reinterpret_cast<Fn>(vtable[1]); // B::fun1 (override)
Fn f2 = reinterpret_cast<Fn>(vtable[2]); // B::fun2
f0(b);
f1(b);
f2(b);
delete b;
空类的内存模型
class A{
};
// sizeof(A) = 1
对于空类 A,它的内存大小 sizeof 是多少呢?
答案是 1
为什么一个空类的大小是 1 呢?
在 C++ 中,只要是一个对象,它一定是有大小的,否则怎么给他分配内存、怎么通过寻址查找对象呢?
所以,对于一个编译器来说,如果这个类没有任何属性,编译器会自动给他添加一个 char 属性,用于分配内存
那对下面这个情况呢?
class A {};
class B : public A {
int X;
};
class C {
A a;
int X;
};
class D : public A {};
// sizeof(B) = 4
// sizeof(C) = 8
// sizeof(D) = 1
- 对于 B 来说,已经存在需要占用内存的属性了,不需要再为了分配内存而给 B 的父类 A 额外添加一个 char
- 简称 空基类优化
- 对于 C 来说,
A a仍然需要一个 char 类区分内存,再加上内存对齐,所以占 8 字节
除了空基类的情况,一般来说继承和组合的方式构成的新类内存大小相同
绝大部分情况,组合优于继承
除此之外,对于空基类还有一些使用方法,比如下面这种写法
class A {
public:
void ReleaseImpl() {}
};
class B : private A {
public:
void Release() { ReleaseImpl(); }
private:
int x;
};
class C {
public:
void Release() { a.ReleaseImpl(); }
private:
A a;
int x;s
}
上述代码,对比类 B 和类 C 的实现方式,这个时候更倾向于使用类 B 而不是类 C
- 更小的内存占用
- 使用
private的继承方式,不会暴露内部接口
除此之外,还有一些使用方法
#include <iostream>
class A1 {
public:
void ReleaseImpl() { std::cout << "A1" << std::endl; }
};
class A2 {
public:
void ReleaseImpl() {std::cout << "A2" << std::endl; }
};
template<typename ToolBase = A1>
class B : private ToolBase {
public:
void Release() { ToolBase::ReleaseImpl(); }
};
int main()
{
auto b = B<A2>();
auto c = B<A1>();
auto d = B();
b.Release();
c.Release();
d.Release();
return 0;
}
结合模板的使用,能够将一些功能拆分到不同的类中,并通过模板选择不同的继承类,来修改程序执行过程中的一些内容
比如,根据继承的基类不同,资源释放的方式也可能不同
类的类型信息
#include <iostream>
class A {
public:
int X;
double Y;
virtual ~A(){}
};
class B : public A {
};
int main()
{
A* a = new A();
A* b = new B();
const std::type_info& t1 = typeid(*a);
const std::type_info& t2 = typeid(*b);
std::cout << t1.name() << std::endl;
std::cout << t2.name() << std::endl;
B* c = dynamic_cast<B*>(a); // nullptr
B* d = dynamic_cast<B*>(b); // success
std::cout << t1 == t2 << std::endl; // false
return 0;
}
a的编译时类型是A,实际类型是A
b的编译时类型时A,实际类型时B
根据编译器不同,type_info 存储的位置也不相同
- MSVC 存储在类型关联的虚函数表中
- GCC/Clang 存储在独立的内存区域中
也就是说,如果使用 MSVC 运行前面的通过虚函数表直接执行虚函数的例子是不能正常运行的,因为 MSVC 的虚函数表存储着额外的信息
类的析构要定义为虚函数
#include <iostream>
class A {
public:
~A(){
std::cout << "~A" << std::endl;
}
};
class B : public A {
public:
~B() {
std::cout << "~B" << std::endl;
}
};
class C : public B {
public:
~C() {
std::cout << "~C" << std::endl;
}
};
int main()
{
A* b = new C();
delete b;
return 0;
}
对于上述代码,理论上我们期望的输出结果是 ~C ~B ~A,因为 b 的实际类型是 C,根据继承规则应该从子类到父类逐步析构
但是实际上的输出结果是 ~A,也就是说并没有执行 C 和 B 的析构
如果类 B 或者类 C 中申请了内存,在析构函数中释放申请的内存,遇到上述情况就会出现析构函数不执行,进而导致内存泄漏的问题
为了解决这个隐患,通常都是讲析构函数定义为虚函数
class A {
public:
virtual ~A(){
std::cout << "~A" << std::endl;
}
};
左值右值
定义
- 左值:命名对象、可取地址、可赋值
- 基本变量类型、数组、数组元素
- 字符串字面量
"success"[0]和&"success"可以正常编过 - 对象变量、对象成员
- 函数(可取地址)
- 返回左值的表达式
- 右值:无名、无法取地址、不可赋值
- 各种临时变量(函数返回值)、字符串临时变量
- 除字符串外的其他基本类型字面量
- lambda 表达式
- 运算符表达式
#include <string>
#include <iostream>
#include <utility>
using namespace std::literals;
template<typename T>
void log(T&& in)
{
std::cout << "log && " << in << std::endl;
}
template<typename T>
void log(T& in)
{
std::cout << "log & " << in << std::endl;
}
void process(int&& data);
void process(int& data);
void process(int&& data)
{
std::cout << "process && " << std::endl;
process(data);// 记得前置声明 void process(int& data) ,这里的 data 是个左值,不前置声明找不到可以匹配的函数
}
void process(int& data)
{
std::cout << "process & " << std::endl;
}
int main()
{
int a = 0;
log(1); // 右值
log(a = 30); // 左值
log("123"); // 左值
log("456"s); // 右值 "456"s 等于 string("456") 得到的是一个临时变量
std::cout << &"success" << std::endl;
int x = 1, y = 2;
process(x+y); //
return 0;
}
msvc 编不过,clang 可以
可以注意以下 process 函数,虽然 process(x+y) 触发的是右值,但是在函数中,data 其实是个左值
移动
- 左值:有身份,不呢个移动
- 纯右值:没身份,可移动
- 将亡值:有身份,可以移动
当源对象是一个左值,移动左值并不安全,因为左值后续持续存在,可能被引用,虽然可以将左值强制转换为右值,但是需要自负安全
当源对象是一个右值,移动很安全
void func(TestCls&& in);
上述代码,形参 in 到底是右值还是左值?
- 对函数调用者来说,
in是一个右值引用,要传递优质 - 对函数内部来说,
in是一个左值引用(可以取地址)
TestCls a1(1, 2);
TestCls a2 = a1; // 左值源 拷贝构造
a1 = a2; // 左值源 拷贝赋值
a1 = std::move(a2); // 移动赋值
// a2.process(); // 危险操作
std::move转为右值
一般来说,一个对象被 std::move 之后,这个对象被认定为无效对象,后续代码中不应再次使用,所以在 std::move 之后仍然执行 a2.process() 是危险操作,可能导致不确定后果
TestCls GetTestCls()
{
TestCls a1(1, 2);
return a1;
// 编译器自动优化为 return std::move(a1);
}
TestCls a2 = GetTestCls(); // 不触发任何构造 复制初始化,但可能被优化
TestCls a3(GetTestCls()); // 不触发任何构造 直接初始化
a2 = GetTestCls(); // 触发移动赋值,此时 a2 已经构造完毕,无法触发优化
上述代码,GetTestCls 函数返回值是一个临时对象,在接收的时候触发的是移动构造
上述代码,TestCls a3(GetTestCls()) 不会触发任何构造,这是因为 C++ 的返回值优化,编译器优化直接构造对象到目标内存,消除临时对象
- 返回值优化(RVO):编译器优化直接构造对象到目标内存,消除临时对象
- 命名返回值优化(NRVO):针对命名局部变量返回时的优化(C++17 起部分场景被强制要求)
针对 TestCls a(GetTestCls()) 预期行为是构建临时对象,调用移动构造。实际是编译器直接在 a 对象的内存位置构造对象,完全跳过了拷贝、移动构造
针对 TestCls a2 = GetTestCls() 从 C++17 开始强制要求进行拷贝省略,等同于直接构造,无需任何拷贝、移动操作
| 构造表达式 | C++ 标准 | 是否触发拷贝、移动构造 | 原因 |
|---|---|---|---|
| TestCls a(GetTestCls()) | <C++17 | 无 | RVO 优化 |
| ≥C++17 | 无 | 强制拷贝省略 | |
| TestCls a2 = GetTestCls() | <C++17 | 无 | 拷贝省略优化 |
| ≥C++17 | 无 | 强制拷贝省略 |
赋值规则
左值、左值引用、右值、右值引用的赋值规则
| & | const & | && | const && | |
|---|---|---|---|---|
| 左值 | 可以 | 可以 | ||
| const 左值 | 可以 | |||
| 右值 | 可以 | 可以 | 可以 | |
| const 右值 | 可以 | 可以 |
转发
以下面的代码为例
#include <string>
#include <iostream>
#include <utility>
void log(int&& x) { std::cout << "right value" << std::endl; }
void log (int& x) { std::cout << "left value " << std::endl; }
void test(int&& x) { log(x); }
void test(int& x) { log(x); }
int main()
{
int x = 1;
test(x); // 输出 left value
test(std::move(x)); // 输出 left value
return 0;
}
无论是传入 test 的是左值还是右值,最终都只会触发 log(int&),因为传入的右值 int&& x 在函数内部被看作是左值
那么一般来说会希望,test 传入右值,则调用 log(int&&); test 传入左值,则调用 log(int&)
接下来将代码修改为下面这个样子,发现实现了我们的目标
void log(int&& x) { std::cout << "right value" << std::endl; }
void log(int& x) { std::cout << "left value " << std::endl; }
template<typename T>
void test(T&& in)
{
log(std::forward<T>(in));
}
// test(x); // 输出 left value
// test(std::move(x)); // 输出 right value
这里需要引入一个概念:引用折叠
| 引用 | 结果 | |
|---|---|---|
T& & |
-> | T& |
T& && |
-> | T& |
T&& & |
-> | T& |
T&& && |
-> | T&& |
这里顺便给出 vs2022 中 std::forward 的实现方式
_EXPORT_STD template <class _Ty>
_NODISCARD _MSVC_INTRINSIC constexpr _Ty&& forward(remove_reference_t<_Ty>& _Arg) noexcept {
return static_cast<_Ty&&>(_Arg);
}
_EXPORT_STD template <class _Ty>
_NODISCARD _MSVC_INTRINSIC constexpr _Ty&& forward(remove_reference_t<_Ty>&& _Arg) noexcept {
static_assert(!is_lvalue_reference_v<_Ty>, "bad forward call");
return static_cast<_Ty&&>(_Arg);
}
这里通过模板的方式来匹配左值和右值,通过 is_lvalue_reference_v 可以判断模板类型是左值还是右值
上述代码可以理解下面这样
template<typename T>
T&& forward(T&& param) {
if(is_lvalue_reference_v<T>::value) {
return param;
} else {
return std::move(param);
}
}
不过上面的代码是运行时判断的,通过 template 可以实现编译时执行
所以当遇到
auto&& obj的时候,不能直接断定obj是右值
智能指针 和 shared_from_this
shared_from_this
class TestCls {
public:
std::unique_ptr<TestCls> GetThis() {
return std::unique_ptr<TestCls>(this);
}
std::shared_ptr<TestCls> GetSharedThis() {
return std::shared_ptr<TestCls>(this);
}
};
int main() {
TestCls a;
auto a1 = TestCls.GetThis();
// auto a2 = TestCls.GetSharedThis();
return 0;
}
上述代码
- 如果想要使用
unique_ptr包装自己,最终会delete原始指针两次,这是不合理的 - 如果想要使用
shared_ptr包装自己,最终会delete原始指针两次,这是不合理的
想要实现通过自身创建智能指针的功能,只需要继承 std::enable_shared_from_this 即可
#include <string>
#include <iostream>
#include <utility>
#include <memory>
class TestCls : public std::enable_shared_from_this<TestCls> {};
int main() {
TestCls* a = new TestCls();
std::shared_ptr<TestCls> a1{ a };
auto a2 = a->shared_from_this();
std::cout << a1.use_count() << std::endl; // 2
std::cout << a2.use_count() << std::endl; // 2
// TestCls b;
// auto b1 = b.shared_from_this();
// 错误 b 会被栈回收 b1 会执行 delete
// TestCls* c = new TestCls();
// {
// auto c1 = c->shared_from_this();
// }
// delete c;
// 错误 c 和 c1 的生命周期不匹配,c1 销毁后 delete 原始指针,但 c 可能仍会被使用
return 0;
}
这里 a1 和 a2 的引用计数都是 2,说明他们指向了同一个 shared_ptr
使用 enable_shared_from_this 需要满足以下几个条件
- 必须是 public 继承
- 不能通过栈对象使用
share_from_this(),上述案例b - 不能通过裸指针使用
share_from_this(),上述案例c - 必须通过
shared_ptr来使用
所以,一般使用 enable_shared_from_this 的类的时候,会通过静态函数来创建,尽量避免直接使用构造函数创建对象
#include <string>
#include <iostream>
#include <utility>
#include <memory>
class TestCls : public std::enable_shared_from_this<TestCls> {
public:
static std::shared_ptr<TestCls> Create() {
return std::make_shared<TestCls>();
}
public:
TestCls() = default;
};
int main() {
auto a = TestCls::Create();
std::shared_ptr<TestCls> a1{ a };
auto a2 = a->shared_from_this();
std::cout << a1.use_count() << std::endl; // 3
std::cout << a2.use_count() << std::endl; // 3
return 0;
}
weak_ptr
那么怎么 shared_from_this 实现的呢?
在说明实现之前,需要先介绍 weak_ptr,
weak_ptr 是对对象的一种弱引用,它不会增加对象的 use_count,weak_ptr 和 shared_ptr 可以相互转化, shared_ptr 可以直接赋值给 weak_ptr,weak_ptr 也可以通过调用 lock 函数来获得 shared_ptr
weak_ptr指针通常不单独使用,只能和shared_ptr类型指针搭配使用。将一个weak_ptr绑定到一个shared_ptr不会改变shared_ptr的引用计数。一旦最后一个指向对象的shared_ptr被销毁,对象就会被释放。即使有weak_ptr指向对象,对象也还是会被释放。weak_ptr并没有重载operator->和operator *操作符,因此不可直接通过weak_ptr使用对象,典型的用法是调用其lock函数来获得shared_ptr示例,进而访问原始对象。
#include <string>
#include <iostream>
#include <utility>
#include <memory>
std::weak_ptr<int> wptr;
void check() {
std::cout << "wptr ref count = " << wptr.use_count() << std::endl;\
if(!wptr.expired()) {
std::shared_ptr<int> sptr = wptr.lock();
std::cout << "value = " << *sptr << std::endl;
} else {
std::cout << "value is invalid" << std::endl;
}
}
int main() {
{
auto s = std::make_shared<int>(5);
wptr = s;
check(); // count = 1 value = 5
}
check(); // cout = 0 value is invalid
return 0;
}
上面的代码,就是对 weak_ptr 和 shared_ptr 转化的基本能使用,可以发现对象 s 创建的时候 wptr 引用计数加一,对象 s 销毁的时候 wptr 引用计数减一。当对象因为引用计数归零而销毁的时候,wptr 的值也无效了
其实在 shared_ptr 中提供一个通过 weak_ptr 初始化的函数,这也是 wptr.lock() 中会调用的函数
// weak_ptr::lock
_NODISCARD shared_ptr<_Ty> lock() const noexcept { // convert to shared_ptr
shared_ptr<_Ty> _Ret;
(void) _Ret._Construct_from_weak(*this);
return _Ret;
}
// shared_ptr::_Construct_from_weak
template <class _Ty2>
bool _Construct_from_weak(const weak_ptr<_Ty2>& _Other) noexcept {
// implement shared_ptr's ctor from weak_ptr, and weak_ptr::lock()
if (_Other._Rep && _Other._Rep->_Incref_nz()) {
_Ptr = _Other._Ptr;
_Rep = _Other._Rep;
return true;
}
return false;
}
_Incref_nz执行的是线程安全无锁的引用计数增加
观察 _Construct_from_weak 可以看到,新创建的 shared_ptr 和原来的 weak_ptr 指向同一个原始指针和引用计数指针
所以在 wptr.lock() 的时候,其引用计数和增加,新创建的 shared_ptr 对象销毁的时候,引用计数减少
shared_from_this 的实现原理
再看 enable_shared_from_this 是如何实现的?
_EXPORT_STD template <class _Ty>
class enable_shared_from_this {
public:
// 有些对外接口函数
_NODISCARD shared_ptr<_Ty> shared_from_this() {
return shared_ptr<_Ty>(_Wptr);
}
private:
template <class _Yty>
friend class shared_ptr;
mutable weak_ptr<_Ty> _Wptr;
};
在 enable_shared_from_this 对 shared_ptr 是友元,同时自己存储了一个 weak_ptr 的对象
在调用 shared_from_this 的时候,直接通过 _Wptr 的构造出一个 shared_ptr 出来,新对象的出事后走的就是前面介绍的 _Construct_from_weak 函数
那么 _Wptr 对象什么时候初始化的呢?
以前面解释的静态函数 Create 为例,下面贴出来关键代码的实现源码和调用过程,包括:std::make_shared 和 shared_ptr::_Set_ptr_rep_and_enable_shared
class TestCls : public std::enable_shared_from_this<TestCls> {
public:
static std::shared_ptr<TestCls> Create() {
return std::make_shared<TestCls>();
}
}
// std::make_shared
_EXPORT_STD template <class _Ty, class... _Types>
_NODISCARD_SMART_PTR_ALLOC
#if _HAS_CXX20
enable_if_t<!is_array_v<_Ty>, shared_ptr<_Ty>>
#else // _HAS_CXX20
shared_ptr<_Ty>
#endif // _HAS_CXX20
make_shared(_Types&&... _Args) { // make a shared_ptr to non-array object
const auto _Rx = new _Ref_count_obj2<_Ty>(_STD forward<_Types>(_Args)...);
shared_ptr<_Ty> _Ret;
_Ret._Set_ptr_rep_and_enable_shared(_STD addressof(_Rx->_Storage._Value), _Rx);
return _Ret;
}
// shared_ptr::_Set_ptr_rep_and_enable_shared
template <class _Ux>
void _Set_ptr_rep_and_enable_shared(_Ux* const _Px, _Ref_count_base* const _Rx) noexcept { // take ownership of _Px
this->_Ptr = _Px;
this->_Rep = _Rx;
if constexpr (conjunction_v<negation<is_array<_Ty>>, negation<is_volatile<_Ux>>, _Can_enable_shared<_Ux>>) {
if (_Px && _Px->_Wptr.expired()) {
_Px->_Wptr = shared_ptr<remove_cv_t<_Ux>>(*this, const_cast<remove_cv_t<_Ux>*>(_Px));
}
}
}
| 模板、变量名 | 作用 |
|---|---|
| _Px, _Ptr | 原始指针 |
| _Rx, _Rep | 引用计数 |
| _Ux | 原始对象类型 |
| negation | 否定的,取反 |
| is_array<_Ty> | 数组对象 |
| is_volatile<_Ux> | volatile 限定类型 |
| _Can_enable_shared<_Ux> | 类型支持启用共享(如存在 _Wptr 成员) |
在调用 TestCls::Create 的时候,会调用 std::make_shared,构建出一个 shared_ptr 的时候,调用其 _Set_ptr_rep_and_enable_shared 初始化对象
在 _Set_ptr_rep_and_enable_shared 中会通过 _Can_enable_shared 模板来检查对象是否支持 enable_shared_from_this
当原始指针 _Px 有效,并 _Wptr 中没有有效值,那么就会初始化或者 _Wptr 对象
所以,enable_shared_from_this 对象的构造顺序应该是这样
- 通过
TestCls::Create创建第一个shared_ptr对象- 得到一个
shared_ptr对象 - 初始化
enable_shared_from_this这个基类中的_Wptr
- 得到一个
- 后续使用时通过
shared_from_this函数创建新的shared_ptr对象- 此时直接通过
_Wptr.lock()来构建新的shared_ptr
- 此时直接通过
tip: _Can_enable_shared 的实现?
_EXPORT_STD template <class _Ty>
class enable_shared_from_this { // provide member functions that create shared_ptr to this
public:
using _Esft_type = enable_shared_from_this;
// 一些接口函数
private:
// 原始指针和引用计数
}
通过定义可以知道,存在名为 enable_shared_from_this::_Esft_type 的类型
template <class _Yty, class = void>
struct _Can_enable_shared : false_type {}; // detect unambiguous and accessible inheritance from enable_shared_from_this
template <class _Yty>
struct _Can_enable_shared<_Yty, void_t<typename _Yty::_Esft_type>>
: is_convertible<remove_cv_t<_Yty>*, typename _Yty::_Esft_type*>::type {
// is_convertible is necessary to verify unambiguous inheritance
};
通过 SFINAE 来匹配类型,如果没有 _Yty::_Esft_type 会匹配到上面的 _Can_enable_shared 类型,得到 false_type
很明显,enable_shared_from_this 存在 _Esft_type,所以会匹配到下面的 _Can_enable_shared 类型
智能指针的使用
在使用智能指针的时候,需要考虑所有权转移的问题,一些时候没必要转移所有权
void process(const TestCls& ); // 极力推荐
void process2(TestCls*); // 可以使用
void process3(unique_ptr<TestCls>); // 一般不推荐,强制转移所有权
void process4(shared_ptr<TestCls>); // 比 unique_ptr 好一点,共享所有权
void process5(const unique_ptr<TestCls>&); // 没必要,大部分情况可以替换成 process(const TestCls&)
void process5(const shared_ptr<TestCls>&); // 比 process4 好一点,用的引用
如果功能函数中不涉及所有权传递,应该使用 T& 或者 T* 作为参数,而不是智能指针
一般建议创建对象的时候使用智能指针
内存机制
泛型
模板的实例化
- 模板类成员
- 普通成员:使用与主模板相同类型模板参数
- 数据成员(变量或常量)
- 成员函数
- 静态成员(数据或函数)
- 成员类型别名
- 成员类型
- 成员模板(使用与主模板不同的类型模板)
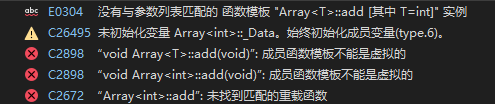
- 成员模板不能定义虚函数,模板实例化会导致链接器不断为虚表增加虚函数增项
#include <iostream>
#include <stdexcept>
template <typename T, size_t N = 10> // N 是默认模板参数
class Array {
public:
// 成员类型别名
using value_type = T;
using reference = T&;
using const_reference = const T&;
using size_type = size_t;
using iterator = T*; // 简化迭代器实现
using const_iterator = const T*;
// 静态成员
static constexpr size_type static_size = N;
// 构造函数
Array() = default;
// 成员函数
reference operator[](size_type pos) {
if (pos >= N) {
throw std::out_of_range("Index out of range");
}
return m_data[pos];
}
iterator begin() noexcept { return m_data; }
const_iterator cbegin() const noexcept { return m_data; }
iterator end() noexcept { return m_data + N; }
const_iterator cend() const noexcept { return m_data + N; }
size_type size() const noexcept { return N; }
bool empty() const noexcept { return N == 0; }
// 静态成员函数
static constexpr size_type max_size() noexcept {
return static_size;
}
// 错误 成员模板不可以是虚函数
template<typename U>
virtual void add() {
std::cout << "add " << typeid(U).name() << std::endl;
}
private:
// 数据成员
value_type m_data[N] = {}; // 内置数组存储元素
};
// 静态成员的类外定义(可选)
template <typename T, size_t N>
constexpr typename Array<T, N>::size_type Array<T, N>::static_size;
// 示例使用
int main() {
Array<int, 5> arr;
// 通过迭代器访问
for (auto& elem : arr) {
elem = 5;
}
// 使用成员类型别名
Array<int>::value_type x = 10;
// 访问静态成员
std::cout << "Max size: " << Array<int, 5>::max_size() << std::endl;
try {
arr[6] = 10; // 抛出异常
}
catch (const std::exception& e) {
std::cerr << "Error: " << e.what() << std::endl;
}
return 0;
}
C++ 模板是一中编译时机制,在编译时生成具体的代码,使用实参将模板定义实例化为具体的类型或函数
- C++支持两种模板
- 类模板
- 函数模板
模板实例化时编译器会对实参类型进行检查,确保实参符合对模板参数的操作要求
- C++模板参数支持两种
- 类型参数,可隐式约束,也可以显示约束
- 值参数,编译时常量,或
constexpr函数。不同值参数时不同类型(不允许时值浮点数、类对象,编译器不能确定值) - 可以为模板参数提供默认值
template <typename T, size_t N = 10> // N 是默认模板参数
class Array {}
Array<int, 5> arr;
关于类型别名,优先使用 using 而不是 typedef,因为 using 支持模板,但是 typedef 不支持
typedef svector = vector<string>;
using svector = vector<string>;
template<typename T>
using myvector = vector<T, Allocator<T>>;
- 数据成员:只要类型被使用,编译i其就会根据其数据成员,生成对应类型结构
- 函数成员:选择性实例化
- 非虚函数:如果实际调用到,则会生成代码;如果没有调用到,则不生成
- 虚函数:无论是否调用,总会生成代码,因为运行时很可能会用到
如果某些模板方法没有被调用,即使包含编译错误,也会被忽略,这就是隐藏编译错误
也可以使用强制实例化模板,来强制要求编译所有模板函数成员,排除所有编译错误,无论是否调用到
template class Array<int>;
Traits
Traits 本质上是一个模板类(或者结构体),通过 类型萃取 (Type Traits) 技术实现一些功能
| 用途 | 说明 |
|---|---|
| 类型信息查询 | 检查类型特征(如是否是指针、是否有拷贝构造函数) |
| 类型操作 | 修改类型属性(如添加 const 修饰、移除引用) |
| 行为定制 | 根据类型特征选择不同算法(如优化 POD 类型的复制行为) |
| 接口统一 | 为不同类型提供统一访问方式(如迭代器类型特征) |
| 编译期条件判断 | 通过 SFINAE(替换失败不是错误)或 if constexpr 控制代码路径 |
标准库常用的一些 traits
在
type_traits文件中
- 类型特征
// 判断类型是否具有某种特性
bool b1 = std::is_void<void>::value; // true
bool b2 = std::is_integral<int>::value; // true
bool b3 = std::is_pointer<int*>::value; // true
bool b4 = std::is_reference<int&>::value; // true
bool b5 = std::is_const<const int>::value; // true
bool b6 = std::is_signed<float>::; // true
还有很多其他
- 类型关系
bool b1 = std::is_same<int, int>::value; // true
bool b2 = std::is_base_of<Base, Derived>::value; // true (若存在继承关系)
bool b3 = std::is_convertible<int, double>::; // true (允许隐式转换)
还有很多其他
- 类型操作
using T1 = std::add_const<int>::type; // const int
using T2 = std::remove_pointer<int*>::; // int
using T3 = std::add_lvalue_reference_t<int>; // int& (C++14 后缀 _t 语法)
using T4 = std::decay_t<int[5]>; // int* (类型退化,类似传值行为)
还有很多其他
- 复合类型检查
bool b1 = std::is_function_v<void()>; // true (C++17 变量模板语法)
bool b2 = std::is_compound_v<int>; // false (基本类型)
bool b3 = std::is_pod_v<std::pair<int, int>>; // POD 类型检查
还有很多其他
迭代器中的 traits
位于
iterator文件中
#include <iterator>
#include <vector>
std::vector<int> vec{1,2,3};
using IterTraits = std::iterator_traits<decltype(vec.begin())>;
using ValueType = IterTraits::value_type; // int
using DiffType = IterTraits::difference_type; // ptrdiff_t
using Pointer = IterTraits::pointer; // int*
using Category = IterTraits::iterator_category; // random_access_iterator_tag
最常见的 traits 是通过模板特化来实现的,为不同类型提供不同实现
template <typename T>
struct is_pointer { static constexpr bool value = false; };
template <typename T>
struct is_pointer<T*> { static constexpr bool value = true; };
那么,使用 traits 有哪些好处呢?
- 所有判断都是在编译期完成的,零运行时开销
- traits 的信息在编译器确定,无法运行时修改
- 可扩展性:允许用户为自定义类型添加特化版本
- 无副作用:仅提供信息,不修改类型本身
| 传统方案 | traits 方案 |
|---|---|
运行时类型判断(dynamic_cast) |
编译期类型判断(零开销) |
| 函数重载(代码冗余) | 单一实现 + 类型特征复用 |
| 硬编码类型限制 | 泛化支持所有满足条件的类型 |
| 易出错的条件检查 | 类型安全的静态断言 |