
README.md 4.0 KB
漏斗算法
文章:https://blog.csdn.net/fengkeyleaf/article/details/118832924
在导航网格中
- 通过凸包和三角形划分,能够得到有关联关系的多边形数组
- 通过 A* 寻路算法,能够得到从起点到目标点会经过的多边形数组
需要通过多边形数组来定位需要经过的路径
一般是会切割成多个三角形不会出现多边形。因为当玩家进入一个三角形的时候,一个边是玩家的入口,另一个边是障碍物,最后只有一个边是出口,比较明确出入关系
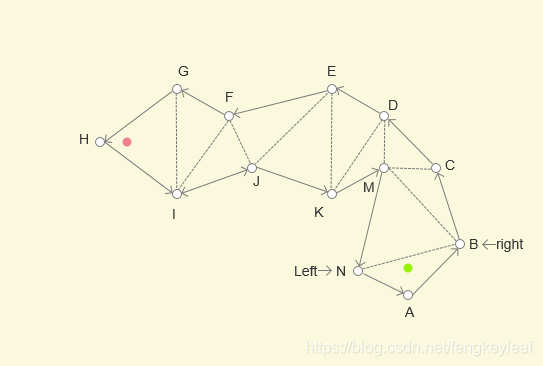
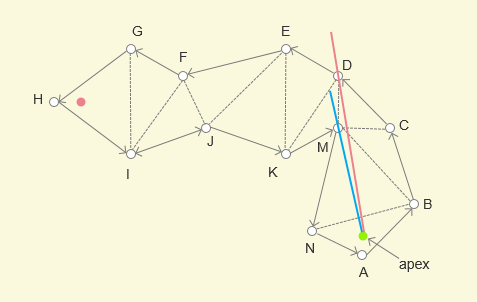
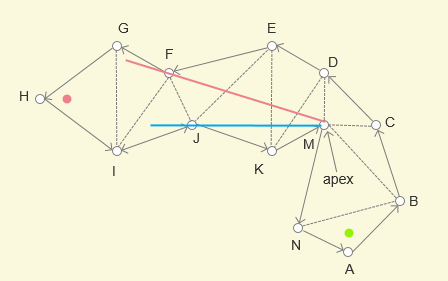
绿点作为起点,红点作为终点,如何找到一条最短路径能够从起点到终点呢?
设定 绿点 为 X,红点为 Y
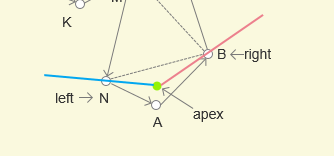
绿点作为起点,被包括在三角形 ABN 中,首先定位到下一个三角形是 NMB,那么公共边 NB 是一定要经过的,所以将 XN 作为左边界,XB 作为右边界,形成一个漏斗形状
漏斗算法计算流程就是下面两步交替运行
- 如果新的顶点与 判定点 形成的漏斗比原来的小,那么将对应的左顶点或者右顶点移动到该位置;反之不做更新
- 如果新的一侧顶点与 判定点 形成的边界,越过了另一侧原顶点与 判定点 形成的边界,则将另一侧原顶点设置新的 判定点,并将该点添加到最路径中
根据上图所示的情况,进行实际分析
- 对于 N 和 B 两点,B点在下一个三角形
BCM边界上,N 没有,所以先动 左边界 XN,左边界变成XM - 由于新边界
XM和XB形成的漏斗比原来小,则XM形成新边界
- 再动右边界,从
XB变更为XC,由于XM和XC形成的漏斗更小,所以右边界变更为XC
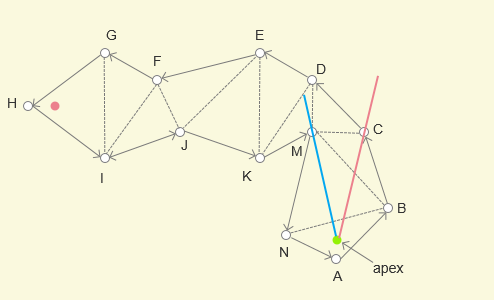
- 再判断 M 和 C 两点,由于 M 在下一个三角形
KMD边界上,所以先动 C 点,也就是右边界 - 由于新右边界
XD和XM形成的漏斗更小了,所以右边界更新为XD
- 更新左边界,
XM更新为XK,由于XK和XD形成的漏斗变大了,所以XK更新失败,退回到XM
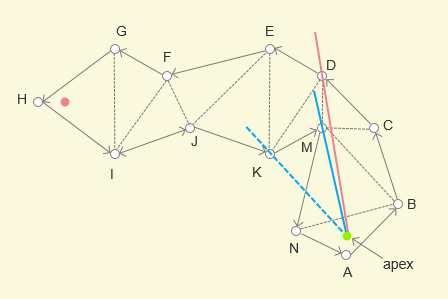
- 更新右边界,由于右边界
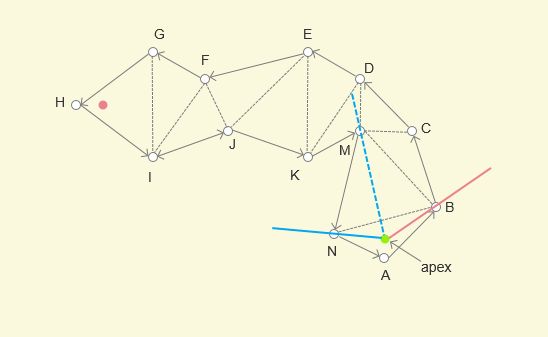
XE超过了左边界XM,所以更新目标点,从 X 点变为 M 点,并将 M 点添加到最短路径中
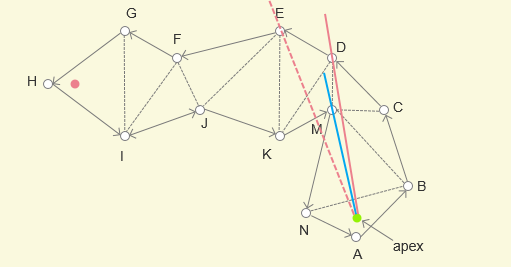
- 以 M 点作为新的判定点,重新设置漏斗
- 将右边界从
MD更新为ME,角度减少,右边界更新成功,变为ME - 将左边界从
MK更新为MJ,角度减少,左边界更新成功,变为MJ - 将右边界从
ME更新为MF,角度减少,右边界更新成功,变为MF - 将左边界从
MJ更新为MI,角度增加,左边界更新失败,保持为MJ - 将右边界从
MF更新为MG,角度增加,右边界更新失败,保持为MF - 将左边界从
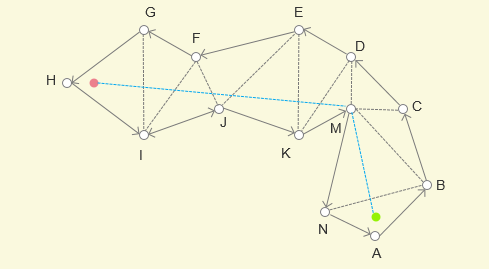
MJ更新为MY(Y是终点),角度减少,左边界更新成功 - 将右边界从
MF更新为MY(Y是终点),角度减少,右边界更新成功 - 左右边界都是 MY,漏斗算法结束
那么最短路径也就确定了,从 X(起点) -> M -> Y(终点)
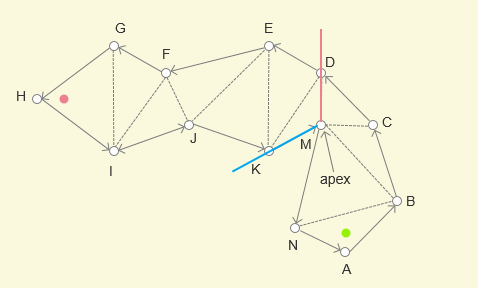
补充说明
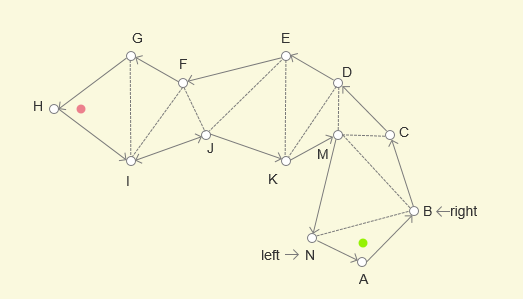
以 N 点为例,规定其为左边界顶点,那么沿着多边形的外边(实线边),所经过的顶点都是左边界顶点,不包括 H
同理,B 为右边界顶点,那么 B、C、D、E、F、G 也都是右边界顶点
通过,这个规则,确定了左边界顶点和右边界顶点
那么,每次更新顶点的时候是先更新左顶点还是右顶点呢?
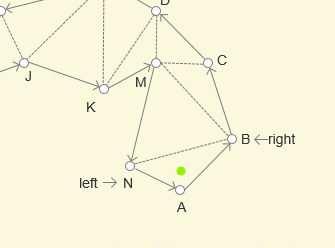
由于所有都是三角形,并且每个三角形只有一个相邻的三角形,所以所以三角形中一定存在一个导航边,和一个外边
以上图为例,BM 作为连接 MCB 和 NMB 的边是导航边,那么另一个边 MN 就是外边
同理,对于三角形 MCD 来说,MD 是导航边,CD 是外边