
README.md 57 KB
OpenGL
光栅化理论及实现
创建窗口
visual studio 创建 Windows 桌面应用程序
// 全局变量:
HINSTANCE hInst; // 当前实例
WCHAR szTitle[MAX_LOADSTRING]; // 标题栏文本
WCHAR szWindowClass[MAX_LOADSTRING]; // 主窗口类名
// 此代码模块中包含的函数的前向声明:
ATOM MyRegisterClass(HINSTANCE hInstance);
BOOL InitInstance(HINSTANCE, int);
LRESULT CALLBACK WndProc(HWND, UINT, WPARAM, LPARAM);
INT_PTR CALLBACK About(HWND, UINT, WPARAM, LPARAM);
| 函数名 | 作用 |
|---|---|
| MyRegisterClass | 这个函数用于注册窗口类。窗口类必须在创建窗口之前注册。这个函数通常会设置窗口的样式、图标、光标以及窗口过程等 |
| InitInstance | 这个函数用于创建和显示窗口。它通常接受一个应用程序实例句柄和一个命令显示标志(如 SW_SHOW),并返回一个布尔值,指示窗口是否成功创建 |
| WndProc | 这是窗口过程函数,是一个消息处理函数,用于响应发送到窗口的各种消息,如按键、鼠标事件、绘制请求等 |
| About | 这通常是一个对话框过程,用于处理“关于”对话框的消息。这个函数类似于窗口过程,但专门用于对话框 |
为了提供一个结构化和模块化的方式来管理 Windows 应用程序的不同部分。通过将全局变量和函数声明放在一个地方,可以更容易地在整个程序中访问和管理它们。此外,前向声明允许在实际定义函数之前引用它们,这有助于解决头文件和源文件之间的依赖关系问题
int APIENTRY wWinMain(_In_ HINSTANCE hInstance,
_In_opt_ HINSTANCE hPrevInstance,
_In_ LPWSTR lpCmdLine,
_In_ int nCmdShow)
{
UNREFERENCED_PARAMETER(hPrevInstance);
UNREFERENCED_PARAMETER(lpCmdLine);
// TODO: 在此处放置代码。
// 初始化全局字符串
LoadStringW(hInstance, IDS_APP_TITLE, szTitle, MAX_LOADSTRING);
LoadStringW(hInstance, IDC_WINDOWSPROJECTTEST, szWindowClass, MAX_LOADSTRING);
MyRegisterClass(hInstance);
// 执行应用程序初始化:
if (!InitInstance (hInstance, nCmdShow))
{
return FALSE;
}
HACCEL hAccelTable = LoadAccelerators(hInstance, MAKEINTRESOURCE(IDC_WINDOWSPROJECTTEST));
MSG msg;
// 主消息循环:
while (GetMessage(&msg, nullptr, 0, 0))
{
if (!TranslateAccelerator(msg.hwnd, hAccelTable, &msg))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
}
return (int) msg.wParam;
}
这就是 Windows窗体程序 的入口函数
_In_ HINSTANCE hInstance:当前实例的句柄_In_opt_ HINSTANCE hPrevInstance:以前实例的句柄,现在总是为 NULL_In_ LPWSTR lpCmdLine:命令行参数的字符串_In_ int nCmdShow:控制窗口如何显示的标志
UNREFERENCED_PARAMETER(hPrevInstance);
UNREFERENCED_PARAMETER(lpCmdLine);
这两行代码是宏,用于避免编译器警告,因为 hPrevInstance 和 lpCmdLine 参数未被使用
LoadStringW(hInstance, IDS_APP_TITLE, szTitle, MAX_LOADSTRING);
LoadStringW(hInstance, IDC_WINDOWSPROJECTTEST, szWindowClass, MAX_LOADSTRING);
这两行代码使用 LoadStringW 函数从资源文件加载字符串到 szTitle 和 szWindowClass 变量中
LoadStringW 函数用于从与指定模块关联的可执行文件中加载字符串资源。这里的 hInstance 句柄是必需的,因为它指定了包含所需字符串资源的模块的实例。在 Windows 编程中,每个运行的程序或动态链接库(DLL)都有一个 HINSTANCE,这是一个唯一的标识符,用于区分不同的程序和资源
在项目中存在一个后缀为 rc 的文件,其文件名一般是 项目名称.rc,作用是配置表

如上图所示,宏 IDS_APP_TITLE 和 IDC_WINDOWSPROJECTTEST 的值对应的字符串内容已经配置在表中
MyRegisterClass(hInstance);
调用 MyRegisterClass 函数来注册窗口类,这是创建窗口所必需的
if (!InitInstance (hInstance, nCmdShow))
{
return FALSE;
}
调用 InitInstance 函数来创建和显示窗口。如果窗口创建失败,则函数返回 FALSE
while (GetMessage(&msg, nullptr, 0, 0))
这是主消息循环。GetMessage 函数从消息队列中检索消息。如果获取到的消息不是退出消息(WM_QUIT),则循环继续
if (!TranslateAccelerator(msg.hwnd, hAccelTable, &msg))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
在消息循环中,首先检查是否有加速键消息。如果没有,则使用 TranslateMessage 函数翻译消息(如键盘输入),然后使用 DispatchMessage 函数将消息分发给窗口过程
至于 WndProc ,当一个窗口创建后,操作系统会将各种消息发送到这个窗口,如按键、鼠标移动、绘制请求等。每当这些消息发生时,操作系统会调用与窗口关联的 WndProc 函数来处理这些消息。WndProc 函数的参数包括一个窗口句柄(HWND),一个消息代码(UINT),以及两个消息特定的参数(WPARAM 和 LPARAM)
在消息循环中,GetMessage 或 PeekMessage 函数从消息队列中检索消息,并将其传递给 TranslateMessage 和 DispatchMessage 函数。DispatchMessage 函数随后会根据消息中包含的窗口句柄找到相应的窗口过程并调用它
例如,如果用户点击了窗口的关闭按钮,操作系统会发送一个 WM_CLOSE 消息到消息队列。GetMessage 会从队列中获取这个消息,然后 DispatchMessage 会调用窗口的 WndProc 函数,并将 WM_CLOSE 作为消息代码传递进去,由 WndProc 函数来决定如何响应这个消息
总的来说,WndProc 函数是应用程序与操作系统之间通信的桥梁,它负责处理所有针对窗口的消息和事件
- 为了方便对窗口进行处理,设置
HWND hWnd;的全局变量 - 为了方便计算,设置窗体的宽高
int wWidth = 800;int wHeight = 600; - 为了方便去除按钮对窗体大小的影响,设置类型为
WS_POPUP
HWND hWnd; // 窗口句柄 经常被用到 所以设置为全局
int wWidth = 800; // 窗口宽度
int wHeight = 600; // 窗口高度
BOOL InitInstance(HINSTANCE hInstance, int nCmdShow)
{
// Other
hWnd = CreateWindowW(szWindowClass, szTitle, WS_POPUP,
CW_USEDEFAULT, 0, wWidth, wHeight, nullptr, nullptr, hInstance, nullptr);
// Other
return TRUE;
}
| 窗口样式 | 值 |
|---|---|
| WS_BORDER | 窗口有一个薄边框 |
| WS_CAPTION | 窗口有标题栏(包括 WS_BORDER 样式) |
| WS_CHILD | 窗口是一个子窗口。具有此样式的窗口不能有菜单栏,并且不能与 WS_POPUP 样式一起使用 |
| WS_DISABLED | 窗口最初被禁用。禁用的窗口无法接收用户输入 |
| WS_DLGFRAME | 窗口有一个通常用于对话框的边框样式 |
| WS_HSCROLL | 窗口有水平滚动条 |
| WS_VSCROLL | 窗口有垂直滚动条 |
| WS_SYSMENU | 窗口有系统菜单 |
| WS_THICKFRAME | 窗口有一个可调整大小的边框 |
| WS_GROUP | 窗口是一组控件的第一个控件 |
| WS_TABSTOP | 窗口是一个制表位,用户可以使用 TAB 键在控件之间导航 |
| WS_MINIMIZE | 窗口最初被最小化 |
| WS_MAXIMIZE | 窗口最初被最大化 |
| WS_OVERLAPPEDWINDOW | 这是一个窗口样式的组合,它创建一个具有标题栏、大小调整边框、窗口菜单以及最小化和最大化按钮的重叠窗口1。这种样式通常用于应用程序的主窗口 |
| WS_POPUP | 创建一个弹出窗口。弹出窗口是顶级窗口,它们与桌面窗口的子窗口列表相连接。应用程序通常使用弹出窗口来显示对话框。弹出窗口与重叠窗口的主要区别在于,弹出窗口不需要有标题,而重叠窗口必须有标题。当弹出窗口没有标题时,它可以创建没有边框的 |
还有很多其他类型
设置画布
int APIENTRY wWinMain(_In_ HINSTANCE hInstance,
_In_opt_ HINSTANCE hPrevInstance,
_In_ LPWSTR lpCmdLine,
_In_ int nCmdShow)
{
// 注册、初始化、创建窗口
// .....
/*===========创建绘图用的位图========*/
void* buffer = 0;
hDC = GetDC(hWnd); // 获取窗口 hWnd 的设备上下文(DC),用于绘图操作
hMem = ::CreateCompatibleDC(hDC); // 创建一个与指定设备上下文(hDC)兼容的内存设备上下文(Memory DC)。这个内存 DC 用于离屏绘制,即在屏幕外部绘制图像
BITMAPINFO bmpInfo; // 它描述了位图的维度和颜色格式
bmpInfo.bmiHeader.biSize = sizeof(BITMAPINFOHEADER);
bmpInfo.bmiHeader.biWidth = wWidth;
bmpInfo.bmiHeader.biHeight = wHeight;
bmpInfo.bmiHeader.biPlanes = 1; // 平面数
bmpInfo.bmiHeader.biBitCount = 32; // 每像素位数(32位,即每个像素4字节)
bmpInfo.bmiHeader.biCompression = BI_RGB; // 压缩方式,实际上存储方式为bgr
bmpInfo.bmiHeader.biSizeImage = 0;
bmpInfo.bmiHeader.biXPelsPerMeter = 0;
bmpInfo.bmiHeader.biYPelsPerMeter = 0;
bmpInfo.bmiHeader.biClrUsed = 0;
bmpInfo.bmiHeader.biClrImportant = 0;
HBITMAP hBmp = CreateDIBSection(hDC, &bmpInfo, DIB_RGB_COLORS, (void**)&buffer, 0, 0); //在这里创建buffer的内存,创建一个设备无关位图,并将其与一个内存块关联。这个内存块由 buffer 指向,用于存储位图的像素数据
SelectObject(hMem, hBmp); // 将新创建的位图(hBmp)选入之前创建的内存设备上下文(hMem)中,这样在 hMem 上的绘图操作将影响到这个位图
memset(buffer, 0, wWidth * wHeight * 4); //清空buffer为0
MSG msg;
// 主消息循环:
while (true)
{
if (PeekMessage(&msg, NULL, 0, 0, PM_REMOVE))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
BitBlt(hDC, 0, 0, wWidth, wHeight, hMem, 0, 0, SRCCOPY);
}
return (int) msg.wParam;
}
这段代码创建了一个可以用于离屏绘制的位图,并准备了相应的内存设备上下文和像素数据缓冲区。这样,您可以在位图上进行绘图操作,然后将其绘制到窗口上,或者进行其他图像处理操作
| 变量名 | 作用 |
|---|---|
| hDC(Device Context Handle) | hDC 是一个设备上下文句柄,它代表了一个绘图表面的整个状态。您可以在这个设备上下文上进行绘图操作,如画线、画形状、输出文本等。在这个例子中,hDC 是通过 GetDC 函数从一个窗口获取的,因此它代表了窗口的客户区的绘图表面 |
| hMem(Memory Device Context Handle) | hMem 是一个内存设备上下文句柄,它是一个与 hDC 兼容的内存中的绘图表面。您可以在这个内存设备上下文上进行绘图操作,而不会影响实际的屏幕。这种技术通常用于复杂的绘图操作,因为它可以减少屏幕闪烁并提高绘图效率 |
| hBmp(Bitmap Handle) | hBmp 是一个位图句柄,它代表了一个设备无关位图(DIB)。这个位图是通过 CreateDIBSection 函数创建的,它可以直接访问像素数据,并且可以被选入一个设备上下文中进行绘图。 |
| buffer(Pointer to the Bitmap’s Pixel Data) | buffer 是一个指针,它指向 CreateDIBSection 函数创建的位图的像素数据。这个数据区域可以被直接访问和修改,以改变位图的内容 |
hDC用于获取窗口的设备上下文,它是绘图操作的起点hMem是从 hDC 创建的,用于在内存中进行绘图操作,这样的操作不会立即反映在用户的屏幕上hBmp是一个位图,它被创建并与hMem关联,这样在hMem上的所有绘图操作都会影响到这个位图buffer是hBmp的像素数据的直接访问点,通过修改buffer,可以改变位图的内容
总结一下就是,hDC 是屏幕的绘图表面,hMem 是内存中的绘图表面,hBmp 是内存中的位图,buffer 是位图的像素数据。在 hMem 和 buffer 上的修改最终会通过 hDC 显示在屏幕上
当完成了所有的绘图操作后,通常会使用 BitBlt 或 StretchBlt 等函数将 hMem 中的位图内容传输到 hDC,从而将图像显示在屏幕上。这个过程称为 双缓冲(double buffering)
如果直接修改 hDC,会导致图形界面更新,用户可能会看到部分重绘过程,导致闪烁。因此使用双缓冲,hDC 只用于给显示器读取数据用于显示,hMem 用于计算,再计算完毕之后一次性写入到 hDC 中
BITMAPINFO 是产生位图所需的信息,主要包含两个部分
BITMAPINFOHEADER:这是一个结构体,包含了位图的基本信息,如位图的大小、宽度、高度、颜色平面数、每像素位数、压缩类型、图像大小等bmiColors:这是一个颜色表,可以是RGBQUAD数组,也可以是指定颜色表中颜色的索引。颜色表的具体内容取决于BITMAPINFOHEADER中的biBitCount和biClrUsed成员的值
位图,也称为栅格图像或点阵图像,是由像素(图片元素)的单个点组成的图像。每个像素都有自己的颜色信息,位图通常用于存储数字照片和其他类型的图像。位图的特点是可以精确地控制每个像素,但缺点是放大后会出现像素化,且文件大小通常比矢量图像
点的绘制
class Canvas
{
private:
int m_Width{ -1 };
int m_Height{ -1 };
RGBA* m_Buffer{ nullptr };
public:
Canvas(int _width, int _height, void* _buffer) {
if (_width <= 0 || _height <= 0) {
m_Width = -1;
m_Height = -1;
}
m_Width = _width;
m_Height = _height;
m_Buffer = (RGBA*)_buffer;
}
~Canvas() {
}
// 画点操作
void drawPoint(int x, int y, RGBA _collor) {
if (x < 0 || x >= m_Width || y < 0 || y >= m_Height) {
return;
}
m_Buffer[y * m_Height + x] = _collor;
}
// 清理操作
void clear() {
if (m_Buffer != nullptr) {
memset(m_Buffer, 0, sizeof(RGBA) * m_Width * m_Height);
}
}
};
封装 Canvas 类,用于绘制点以及对外提供接口
在 wWinMain 中创建并初始化全局 Canvas 对象
GT::Canvas* _canvas = nullptr;
int APIENTRY wWinMain(_In_ HINSTANCE hInstance,
_In_opt_ HINSTANCE hPrevInstance,
_In_ LPWSTR lpCmdLine,
_In_ int nCmdShow)
{
/*===========创建绘图用的位图========*/
_canvas = new GT::Canvas(wWidth, wHeight, buffer);omFile("res/bk.jpg");
MSG msg;
// 主消息循环:
while (GetMessage(&msg, nullptr, 0, 0))
{
if (!TranslateAccelerator(msg.hwnd, hAccelTable, &msg))
{
TranslateMessage(&msg);
DispatchMessage(&msg);
}
Render();
}
}
随后在 Render 的时候设置绘制点的信息
void Render() {
_canvas->clear();
for (int x = 0; x < wWidth; ++x) {
_canvas->drawPoint(x, 200, GT::RGBA(255, 0, 0, 0));
}
// 将 hMem 的数据一次写入到 hDC 中
BitBlt(hDC, 0, 0, wWidth, wHeight, hMem, 0, 0, SRCCOPY);
}
上述代码在高度为 100 的地方绘制了一条横着的红线
因为 Canvas 是直接对 buffer 进行操作,buffer 关联着 hMem, hMem 又同步给 hDC ,所以 Canvas 直接对 buffer 进行操作就可以改变显示的内容
直线绘制算法: Brensenham 算法
已知点 $P_1$ 和 点 $P_2$,推到直线算法,并且不能出现浮点数

目前讨论和推导的是 0 < k < 1 这部分,并且 x0 < x1,其他部分可以通过稍作修改达到同样的效果
| 直线 | 填充 |
|---|---|
 |
 |
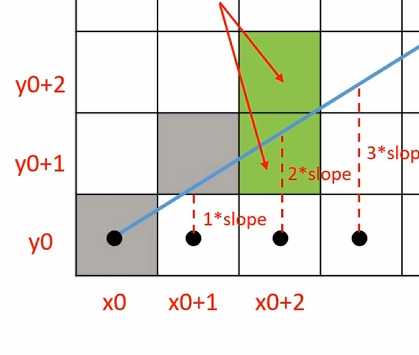
如上图所示,每个网格就表示一个像素,黑点就是像素的中心点
就一般计算公式 $y = kx + b$ 来说,一般 $y_i = y_0 + k * i$,然后通过四舍五入来得到像素的纵坐标
以 $x_{0+1}$ 为例:
- 当 $1*slope < 0.5$ 时就执行四舍,也就是 $y{0+1} = y{0}$
- 当 $1*slope >= 0.5$ 时就执行五入,也就是 $y{0+1} = y{0} + 1$
slope也就是斜率k
注意:由于之前限制过斜率 0 < k < 1,所以相邻横坐标对应的纵坐标最多加一
绝对不可能出现 $y_{0+1} = y_0 + 2$ 的情况
所以我们实际上要做的就是判断 $1*slope < 0.5$ 是否成立
由于 $k = dy/dx$ 带入到上面的不等式
- $dy/dx < 0.5$
- $2*dy < dx$
- $2dy - dx < 0$
通过上面公式推算,成功将算式中的浮点数变为整数计算
再以 $x_{0+2}$ 为例
| 状况1 | 状况2 |
|---|---|
 |
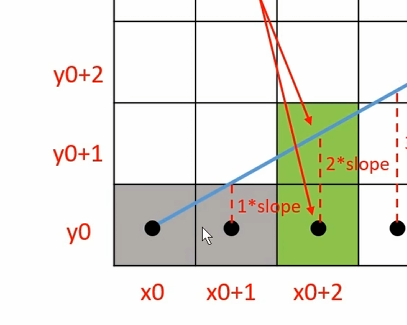 |
如果前一个 $x{0+1}$ 的计算结果是 $1*slope >= 0.5$ ,那么对于 $x{0+2}$ 来说
- 当 $2*slope < 1.5$ 时就执行四舍,也就是 $y{0+2} = y{0+1}$
- 当 $2*slope >= 1.5$ 时就执行五入,也就是 $y{0+2} = y{0+1} + 1$
所以对于 $y_{0+1}$ 来说是判断 $2*slope < 1.5$ 是否成立
- $2*dy/dx < 1.5$
- $dy/dx < 3/4$
- $4dy - 3dx < 0$
- $(2dy - dx) + 2dy - 2dx < 0$
- $(2dy - dx) + 2(dy - dx) < 0$
1.5 是因为一格像素高度为1
需要注意, $2dy - dx$ 是 $x_{0+1}$ 时计算出来的,也就是说当前一个像素点计算属于 $2dy -dx >= 0$ 时,下一个的计算公式是 $(2dy - dx) + 2dy - 2dx < 0$
如果前一个 $x{0+1}$ 的计算结果是 $1*slope < 0.5$ ,那么对于 $x{0+2}$ 来说
- 当 $2*slope < 0.5$ 时就执行四舍,也就是 $y{0+2} = y{0+1}$
当 $2*slope >= 0.5$ 时就执行五入,也就是 $y{0+2} = y{0+1} + 1$
$2*dy/dx < 0.5$
$4*dy - dx < 0$
$(2dy - dx) + 2dy < 0$
需要注意, $2dy - dx$ 是 $x_{0+1}$ 计算出来的,也就是说当前一个像素点计算属于 $2dy -dx < 0$ 时,下一个的计算公式是 $(2dy - dx) + 2dy < 0$
也就是说 $yi$ 下一格 $y{i+1}$ 的值是 $y{i+1} = y{i}$ 还是 $y{i+1} = y{i} + 1$ 可以根据 $y{i}$ 这一格直接推理出来的
- 如果 $y_i$ 是前面所说的状况一,也就是 $yi = y{i-1} + 1$ ,那么 $y_{i+1}$ 的计算公式就是 $(2dy - dx) + 2(dy - dx) < 0$
- 如果 $y_i$ 是前面所说的状况二,也就是 $yi = y{i-1}$ ,那么 $y_{i+1}$ 的计算公式就是 $(2dy - dx) + 2dy < 0$
同样的思路可以一直这样推理下去,直到线段的末尾
递推的思想
void func(int x0, int y0, int x1, int y1) {
int dx = x1 - x0, dy = y1 - y0;
// incrE 就是前一个像素格计算结果是 2dy - dx < 0,先将计算结果缓存下来
// incrNE 就是前一个像素格计算结果是 2dy - dx >= 0,先将计算结果缓存下来
int incrE = 2*dy, incrNE = 2*(dy - dx);
int d = 2*dy - dx; // 第一次得计算 2dy - dx 是否大于0
int x = x0, y = y0;
for(x = x0 + 1; x <= x1; ++x) {
if(d < 0) {
d += incrE;
} else {
d += incrNE;
y++;
}
// 那么下一格像素坐标就是 (x, y)
}
}
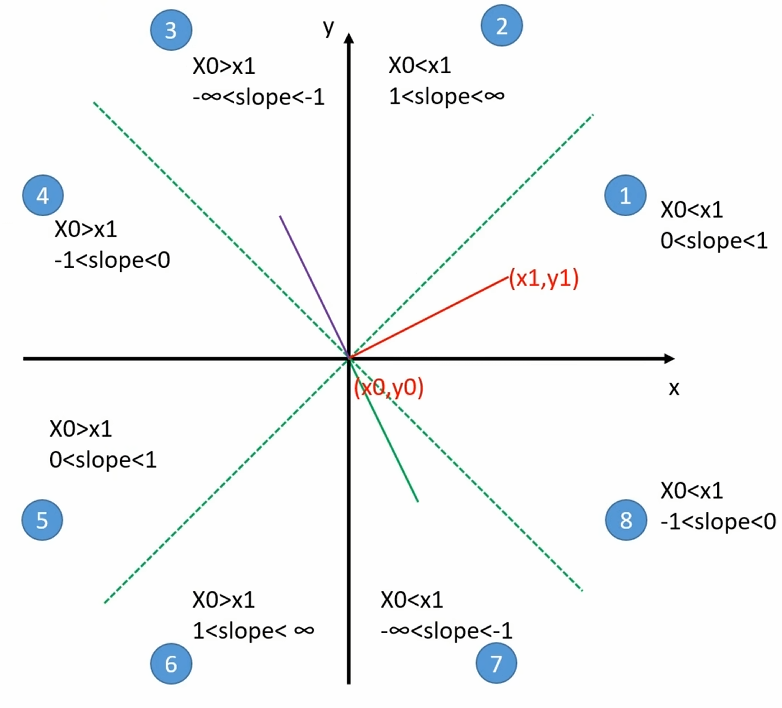
我们前面讨论了 区域1 时的计算公式和算法,对于其他状况来说, Y 轴坐标的区域 3、4、5、6 只要简单的交换线段的起点和终点,都能变换 Y 轴右侧的对应区域
| 左侧状态 | 对应 | 右侧状态 | | --- | --- | --- | | 3 | => | 7 | | 4 | => | 8 | | 5 | => | 1 | | 6 | => | 2 |
对于 区域2 也就是 slope > 1 的区域来说,交换横纵坐标即可变换到区域1,等价于关于 $y = x$ 直线做对称变换。绘制像素时再交换每个像素的 x、y 即可变换回来
对于 区域7、8 也就是 slope < 0 的区域来说,对 x 轴做镜像变换即可,让 $y = -y$ 就能变换到区域1、2,等像素坐标计算完毕之后再变换回来
直线上的颜色
封装 Point 类,用于存储点的信息,包括 x、y 坐标和 RGBA 颜色信息
struct Point
{
public:
int m_x;
int m_y;
RGBA m_color;
Point(int _x = 0, int _y = 0, RGBA _color = RGBA(0, 0, 0, 0))
{
m_x = _x;
m_y = _y;
m_color = _color;
}
~Point()
{
}
};
简单的直线的颜色计算,只需要根据两端点的颜色信息进行线性插值即可
inline RGBA colorLerp(const RGBA& _color1, const RGBA& _color2, float _scale) {
RGBA result;
result.m_r = _color1.m_r + (float)(_color2.m_r - _color1.m_r) * _scale;
result.m_g = _color1.m_g + (float)(_color2.m_g - _color1.m_g) * _scale;
result.m_b = _color1.m_b + (float)(_color2.m_b - _color1.m_b) * _scale;
result.m_a = _color1.m_a + (float)(_color2.m_a - _color1.m_a) * _scale;
return result;
}
然后在绘制直线的时候,只需要根据计算点的进入即可知道点的颜色插值
for (int index = 0; index < sumStep; ++ index) {
auto pointColor = colorLerp(pt1.m_color, pt2.m_color, (float)index / sumStep);
drawPoint(Point(xNow, yNow, pointColor));
// 后续 brensenham 算法计算
}
三角形绘制-扫描线算法

最简单暴力的做法就是一行一行遍历整个屏幕的像素,判断像素是否在点上
基于上面的想法进行优化,找到三角形的最小包围盒,然后对包围盒内的像素进行遍历
- 那么如何快速判断点是否在三角形内呢?
算法有很多:射线法、叉积法等
叉积法:按照多边形的点,逆时针连线构成边,只要点在每个边的左侧就是在多边形内
射线法:以被测点Q为端点,向任意方向作射线(一般水平向右作射线),统计该射线与多边形的交点数。如果为奇数,Q在多边形内;如果为偶数,Q在多边形外。计数的时候会有一些特殊情况
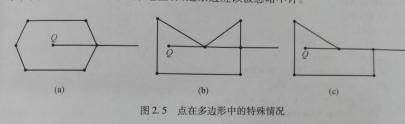
a情况: 与点相交,相当于与两个线段相交,此时只计算一个 b情况: 与点和线相交,此时应该忽略点 c情况:与一条边重合,此时应该忽略边
- 如何将多边形的点按照逆时针排序呢?不能保证输入的点是有序的
这里需要引入极角
极角是指一个点相对于原点的线段与某个参考方向(通常是水平轴)之间的夹角。 在多边形的排序算法中,我们以多边形的重心作为原点,并将重心到多边形顶点的线段与水平轴之间的夹角作为极角。 将多边形的点按照极角从小到大进行排序后,可以得到一个有序的点集,其中顶点的连接顺序就是逆时针的。
不过这里是绘制三角形,所以不用考虑有序的问题,无论输入顺序如何都是顺时针或者逆时针
射线法在顺时针或逆时针都可以使用,所以这里最合适
一般算法都要求点的输入顺序必须是顺时针或者逆时针,不能是无序输入
const double eps = 1e-6;
const double PI = acos(-1);
//三态函数,判断两个double在eps精度下的大小关系
int dcmp(double x)
{
if(fabs(x)<eps) return 0;
else
return x<0?-1:1;
}
//判断点Q是否在P1和P2的线段上
bool OnSegment(Point P1,Point P2,Point Q)
{
// 这个函数用于判断点 Q 是否在线段 P1P2 上
// 它先计算向量 (P1-Q)^(P2-Q) 的叉积是否为 0(判断点 Q 是否在直线 P1P2 上)
// 然后再判断点 Q 是否在线段 P1P2 的范围内(计算 (P1-Q)*(P2-Q) 的点积是否小于等于 0)
// 如果满足这两个条件,则点 Q 在线段 P1P2 上
return dcmp((P1-Q)^(P2-Q))==0&&dcmp((P1-Q)*(P2-Q))<=0;
}
//判断点P在多边形内-射线法
bool InPolygon(Point P)
{
bool flag = false; //相当于计数
Point P1,P2; //多边形一条边的两个顶点
for(int i=1,j=n;i<=n;j=i++)
{
//polygon[]是给出多边形的顶点
P1 = polygon[i];
P2 = polygon[j];
if(OnSegment(P1,P2,P)) return true; //点在多边形一条边上
// (dcmp(P1.y-P.y)>0 != dcmp(P2.y-P.y)>0),它判断点 P 的纵坐标是否在线段 P1P2 的纵坐标范围内
// (P.y-P1.y)*(P1.x-P2.x)/(P1.y-P2.y) 得到交点的横坐标,再与点 P 的横坐标 P.x 进行比较,判断交点是否在点 P 的左侧
if( (dcmp(P1.y-P.y)>0 != dcmp(P2.y-P.y)>0) && dcmp(P.x - (P.y-P1.y)*(P1.x-P2.x)/(P1.y-P2.y)-P1.x)<0)
flag = !flag;
}
return flag;
}
上面的算法是从其他地方复制的,贴上了自己对算法的解释
向量叉乘(或向量积、叉积)的结果是一个向量,其方向垂直于原来两个向量所在的平面,而其大小则与两个原向量构成的平行四边形的面积成正比。在二维空间中,叉乘的结果可以被视作一个标量(即三维空间中的向量的垂直分量),并且该标量代表了向量构成的平行四边形的有向面积
当两个二维向量 A 和 B 的叉乘结果为 0,这意味着两个向量的叉乘所形成的平行四边形面积为 0。具体来说,有以下几种情况:
- 并行或共线(Collinear):向量 A 和 B 指向完全相同或相反的方向,即一个向量可以通过乘以一个标量来表达另一个向量。例如,如果 A = 2B 或 A = -B。
- 零向量:如果其中一个或两个向量是零向量(即其大小为0),那么它们的叉乘结果也将为0
扫描线算法简单实现
void Canvas::drawTriangle(const Point& pt1, const Point& pt2, const Point& pt3)
{
// 获取包围盒
int left = MIN(pt3.m_x, MIN(pt2.m_x, pt1.m_x));
int bottom = MIN(pt3.m_y, MIN(pt2.m_y, pt1.m_y));
int right = MAX(pt3.m_x, MAX(pt2.m_x, pt1.m_x));
int top = MAX(pt3.m_y, MAX(pt2.m_y, pt1.m_y));
// 剪裁屏幕
left = MAX(left, 0);
bottom = MAX(bottom, 0);
right = MIN(right, m_Width);
top = MIN(top, m_Height);
std::vector<Point> points = { pt1, pt2, pt3 };
for (int x = left; x <= right; ++x) {
for (int y = bottom; y <= top; ++y) {
if (judgeInTriangle(GT::Point(x, y), points)) {
drawPoint(Point(x, y, RGBA(255, 0, 0)));
}
}
}
}
三角形效率绘制-平底平顶三角形绘制
如果一个三角形既不是平底也不是平顶,它可以被分割成一个平底和一个平顶三角形
- 平底三角形:三角形的底部两个顶点在同一水平线上
- 平顶三角形:三角形的顶部两个顶点在同一水平线上
对于绘制这两种三角形,我们可以使用线性插值的方法来高效地计算每一水平线(scanline)上的交点,并填充这些像素。具体步骤如下:
- 排序顶点:根据 y 坐标对三角形的三个顶点进行排序,确定三角形是平顶还是平底。如果不是这两种类型,则需要分割
- 计算斜率:对于平底或平顶三角形,计算两侧边的斜率(dx/dy),以确定每增加一行 y,x 应该增加多少
- 扫描填充:
- 对于平底三角形,从顶点向下扫描到底边
- 对于平顶三角形,从底边向上扫描到顶点
- 在每个 y 级别,根据斜率更新 x 的位置,填充从左到右的像素
对于一般的三角形,可以按照 y 值排序顶点后,找到中间点,将三角形分为一个平底和一个平顶三角形,然后分别使用上述方法渲染
这种方法的优势在于它简化了扫描过程,减少了计算量,使得三角形的填充效率更高
// pt1 和 pt2 是 y 相等的两个点,pt 是另一个顶点
void Canvas::drawTriangleFlat(const Point& pt1, const Point& pt2, const Point& pt)
{
float k1 = 0.0f;
float k2 = 0.0f;
// 计算斜率 为了防止除0的情况 判断一层
if (pt.m_x != pt1.m_x) {
k1 = (pt1.m_y - pt.m_y) * 1.0f / (pt1.m_x - pt.m_x);
}
if (pt.m_x != pt2.m_x) {
k2 = (pt2.m_y - pt.m_y) * 1.0f / (pt2.m_x - pt.m_x);
}
bool upToDown = pt.m_y > pt1.m_y; // 判断向上/向下
int stepValue = upToDown ? -1 : 1; // 每次计算 y 值 +1/-1
int startX = pt.m_x; // 顶点的 x 坐标,后面根据斜率和顶点X去算
int totalStemp = abs(pt.m_y - pt1.m_y) + 1; // 总共要计算多少步
for (int posY = pt.m_y, step = 0; step < totalStemp; posY += stepValue, ++step) {
// 根据斜率计算该情况下点的 x 值
int l1x = startX + 1 / k1 * stepValue * step;
// 线性插值计算端点颜色
RGBA color1 = colorLerp(pt.m_color, pt1.m_color, step * 1.0 / totalStemp);
// 根据斜率计算该情况下点的 x 值
int l2x = startX + 1 / k2 * stepValue * step;
// 线性插值计算端点颜色
RGBA color2 = colorLerp(pt.m_color, pt2.m_color, step * 1.0 / totalStemp);
Point p1 = Point(l1x, posY, color1);
Point p2 = Point(l2x, posY, color2);
drawLine(p1, p2);
}
}
上面代码是绘制一个平底平顶三角形的,接下来就是将任意三角形转成绘制一个或两个平底平顶三角形
void Canvas::drawTriangle(const Point& pt1, const Point& pt2, const Point& pt3)
{
std::vector<Point> pVec;
pVec.push_back(pt1);
pVec.push_back(pt2);
pVec.push_back(pt3);
// 将顶点按照 y 坐标进行排序,使得 ptMax 是 y 坐标最大的点,ptMin 是 y 坐标最小的点
std::sort(pVec.begin(), pVec.end(), [](const Point& pt1, const Point& pt2) { return pt1.m_y > pt2.m_y; });
Point ptMax = pVec[0]; // y 最大的点
Point ptMid = pVec[1]; // y 中间的点
Point ptMin = pVec[2]; // y 最小的点
// 如果最大的两个 y 值相等,则是平顶三角形
if (ptMax.m_y == ptMid.m_y)
{
drawTriangleFlat(ptMax, ptMid, ptMin);
return;
}
// 如果最小的两个 y 值相等,则是平底三角形
if (ptMin.m_y == ptMid.m_y)
{
drawTriangleFlat(ptMin, ptMid, ptMax);
return;
}
// 其他则通过直线公式 求出另一个端点的值
float k = 0.0;
if (ptMax.m_x != ptMin.m_x)
{
k = (float)(ptMax.m_y - ptMin.m_y) / (float)(ptMax.m_x - ptMin.m_x);
}
float b = (float)ptMax.m_y - (float)ptMax.m_x * k;
Point npt(0, 0, RGBA(255, 0, 0));
npt.m_y = ptMid.m_y;
if (k == 0)
{
npt.m_x = ptMax.m_x;
}
else
{
npt.m_x = ((float)npt.m_y - b) / k;
}
float s = (float)(npt.m_y - ptMin.m_y) / (float)(ptMax.m_y - ptMin.m_y);
npt.m_color = colorLerp(ptMin.m_color, ptMax.m_color, s);
drawTriangleFlat(ptMid, npt, ptMax);
drawTriangleFlat(ptMid, npt, ptMin);
return;
}
三角形效率绘制-优化及剪裁提速
如果三角形不在屏幕范围内,那么三角形是不需要绘制的;又或者如果三角形很大,超过屏幕,那么只需要绘制屏幕内的,而不用遍历整个三角形
以 1920 * 1080 的屏幕为例,三角形三个点的坐标是 (-5000, -5000), (0, 5000), (5000, -5000) 为例,很明显如果便利三角形的每个点是及其浪费性能的,因为很多地方根本不需要计算
所以,在绘制三角形之前要进行一个基本的剔除操作
首先就是判断三角形与绘制矩形是否有交点
- 如果三角形在矩形内部, 则三角形和矩形相交
- 如果矩形在三角形内部, 则三角形和矩形相交
- 如果三角形至少有一条边(线段)和矩形的至少一条边(线段)相交
| 情况一 | 情况二 | 情况三 | 情况四 | 情况五 |
|---|---|---|---|---|
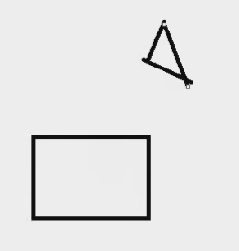 |
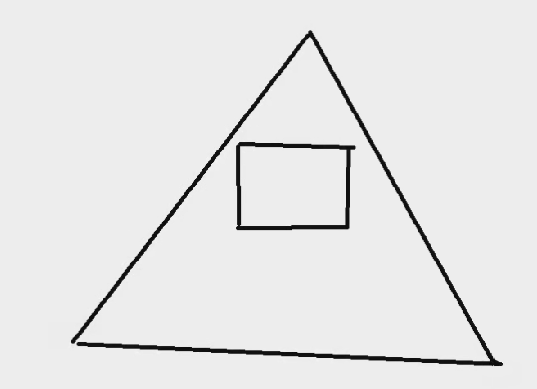 |
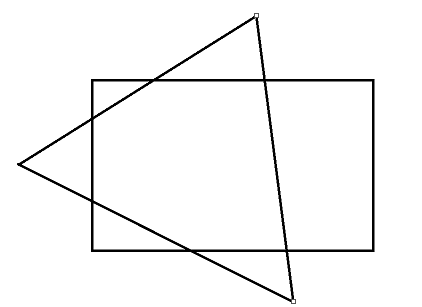 |
 |
 |
在绘制之前先判断是否需要绘制,只有需要绘制的三角形才会进入后续流程
在绘制三角形时,为了避免超大三角形导致计算量爆炸,所以绘制之前先计算起点 Y 和终点 Y,起点 X 和终点 X 的值,剔除无效区域的绘制
// 限制绘制区域 计算 posY 和 step 的值 防止出现 y = 1000000 或者 y = -1000000
if (!GT::UTool::inRange(pt.m_y, 0, m_Height) || !GT::UTool::inRange(pt1.m_y, 0, m_Height)) {
int pos1Y = GT::UTool::clamp(pt1.m_y, 0, m_Height);
posY = GT::UTool::clamp(pt.m_y, 0, m_Height);
step = abs(posY - pt.m_y);
totalStemp = abs(pt.m_y - pt1.m_y) - abs(pt1.m_y - pos1Y);
}
/**
* 其他计算代码
*/
int l1x = startX + 1 / k1 * stepValue * step;
RGBA color1 = colorLerp(pt.m_color, pt1.m_color, step * 1.0 / totalStemp);
int l2x = startX + 1 / k2 * stepValue * step;
RGBA color2 = colorLerp(pt.m_color, pt2.m_color, step * 1.0 / totalStemp);
int edgeX1 = UTool::clamp(l1x, 0, m_Width); // 将边界限制在画布左右两边 避免出现 x = -100000 或者 x = 100000 的情况
int edgeX2 = UTool::clamp(l2x, 0, m_Width);
RGBA edgeColor1 = colorLerp(color1, color2, abs(edgeX1 - l1x) * 1.0f / abs(l2x - l1x)); // 根据端点颜色 重新计算直线两端颜色
RGBA edgeColor2 = colorLerp(color1, color2, abs(edgeX2 - l1x) * 1.0f / abs(l2x - l1x));
Point p1 = Point(edgeX1, posY, edgeColor1);
Point p2 = Point(edgeX2, posY, edgeColor2);
图形处理及纹理系统
图片读取及绘制
关注一下我们的 RGBA 结构体
struct RGBA
{
byte m_b;
byte m_g;
byte m_r;
byte m_a;
RGBA(byte _r = 255,
byte _g = 255,
byte _b = 255,
byte _a = 255)
{
m_r = _r;
m_g = _g;
m_b = _b;
m_a = _a;
}
};
其属性从上往下是 b、g、r、a ,而不是正常的 r、g、b、a ,这是因为直接我们直接将 buffer 连接到 hdc,而 HDC 的读取内存后解析的顺序是 b、g、r、a
如果我们修改 RGBA 结构体
struct RGBA
{
byte m_r;
byte m_b;
byte m_g;
byte m_a;
}

所以后面如果出现图片显示时,颜色不对可能就需要考虑结构体这方面的问题了
这里直接使用 stb_image 进行图片操作
// 需要定义 STB_IMAGE_IMPLEMENTATION 来开启 stb_image 的功能
#define STB_IMAGE_IMPLEMENTATION
#include"stb_image.h"
//stbimage读入的图片是反过来的
stbi_set_flip_vertically_on_load(true);
unsigned char* bits = stbi_load(_fileName, &_width, &_height, &_picType, STBI_rgb_alpha);
stbi_image_free(bits);
简单操作如上代码,加载图片得到宽、高、颜色信息,释放读取数据
为了方便图片操作,封装 Image 类
class Image
{
private:
int m_Width = 0; // 图片宽度
int m_Height = 0; // 图片高度
RGBA* m_Data = nullptr; // 图片颜色数据
public:
int GetWidth();
int GetHeight();
RGBA GetColor(int x, int y);
Image(int _width, int _height, byte* _data) {
m_Width = _width;
m_Height = _height;
if (_data) {
m_Data = new RGBA[m_Width * m_Height];
memcpy(m_Data, _data, sizeof(RGBA) * m_Width * m_Height);
}
}
~Image() {
if (m_Data)
{
delete[] m_Data;
m_Data = nullptr;
}
}
public:
static Image* readFromFile(const char* _fileName);
}
对外统一使用 readFromFile 来创建 Image 对象
Image* Image::readFromFile(const char* _fileName)
{
int _picType = 0;
int _width = 0;
int _height = 0;
//stbimage读入的图片是反过来的
stbi_set_flip_vertically_on_load(true);
unsigned char* bits = stbi_load(_fileName, &_width, &_height, &_picType, STBI_rgb_alpha);
Image* _image = new Image(_width, _height, bits);
stbi_image_free(bits);
return _image;
}
随后在 Canvas 中添加 drawImage 接口
void Canvas::drawImage(int inX, int inY, GT::Image* inImage)
{
for (int u = 0; u < inImage->GetWidth(); ++u) {
for (int v = 0; v < inImage->GetHeight(); ++v) {
RGBA color = inImage->GetColor(u, v);
drawPoint(Point(inX + u, inY + v, color));
}
}
}
先简单的将图片指定位置的颜色直接绘制到 Canvas 上
很明显颜色错了,也就是说使用 stb_image 读出来图片的颜色数据与 Canvas 颜色数据位并不相同,所以需要将颜色 stb_image 读出来的数据转换一下
unsigned char* bits = stbi_load(_fileName, &_width, &_height, &_picType, STBI_rgb_alpha);
for (int i = 0; i < _width * _height * 4; i += 4)
{
byte tmp = bits[i];
bits[i] = bits[i + 2];
bits[i + 2] = tmp;
}
Image* _image = new Image(_width, _height, bits);
stbi_image_free(bits);
| 原图 | 转换之前绘制图 | 转换之后的绘制图 |
|---|---|---|
 |
 |
 |
alpha 测试绘制
A 通道是一个 0~255 的值,表示 alpha 的值,表示像素的透明值
- 如果
alpha为 0,表示该像素不应该被显示 - 如果
alpha为 255, 表示该像素正常显示 - 如果
alpha为 125, 表示该像素 RGB 颜色显示程度

最简单粗暴解决方案就是设置设置一个 limit 值,当像素的 alpha 通道大于指定值时才能够进行绘制
void Canvas::setAlphaLimit(byte inLimit) {
m_alphaLimit = inLimit;
}
void Canvas::drawImage(int inX, int inY, GT::Image* inImage)
{
for (int u = 0; u < inImage->GetWidth(); ++u) {
for (int v = 0; v < inImage->GetHeight(); ++v) {
RGBA color = inImage->GetColor(u, v);
if (color.m_a > m_alphaLimit) {
drawPoint(Point(inX + u, inY + v, color));
}
}
}
}
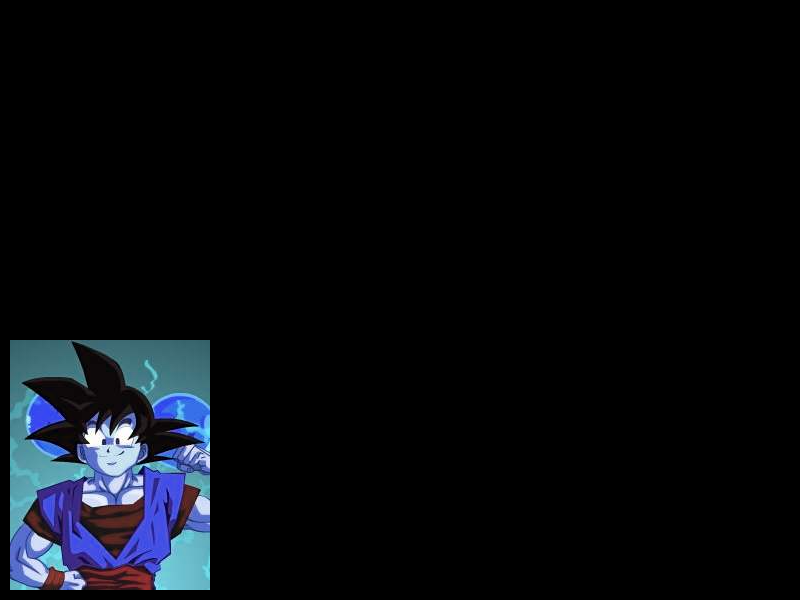
通过上面粗暴的设置绘制或者不绘制,能够等到一个还可以的效果

但是观察任务边缘可以发现,边缘过度极其僵硬,这是因为是直接设置像素的显隐性。一般来说为了过度平滑,没有这么明显的毛刺,会设置边缘像素的透明度,让其平滑过渡
这里就涉及到 带 alpha 颜色混合
RGBA srcColor = inImage->GetColor(u, v);
RGBA dstColor = getColor(inX + u, inY + v);
RGBA finalColor = colorLerp(dstColor, srcColor, srcColor.m_a / 255.0f);
drawPoint(Point(inX + u, inY + v, finalColor));
| 未开启 alpha 混合 | 开启了 alpha 混合 |
|---|---|
|
 |
可以发现衣服边缘锯齿突刺明显减少,边缘过度更加平滑
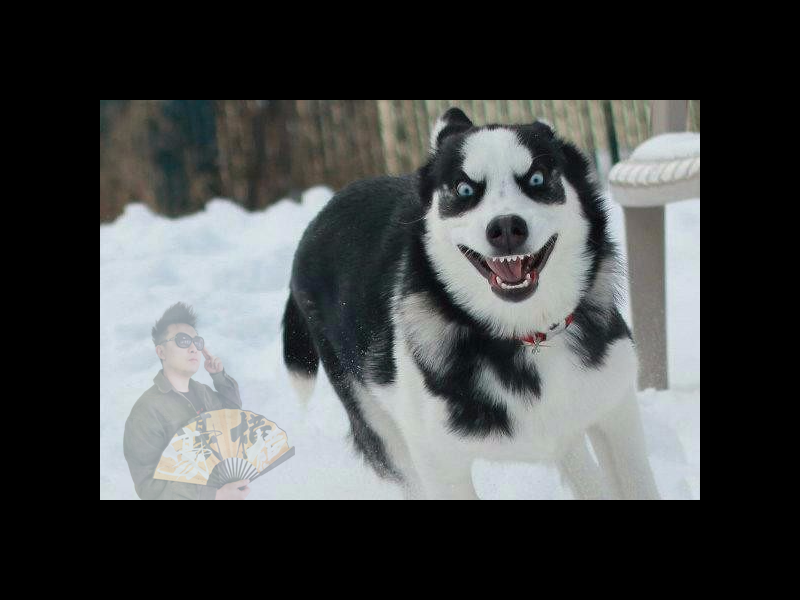
图片透明度和玻璃效果
一般来说不会直接设置图片的透明度,而是设置一个 Sprite 的透明度,在计算的时候会根据 Sprite 的透明度和像素的透明度算出真正的透明度,不过这里不封装 Sprite 了,简单粗暴将图片的透明度放在 Image 中
float alpha = (float)srcColor.m_a / 255.0f * inImage->getAlpha();
RGBA finalColor = colorLerp(dstColor, srcColor, alpha);
只需要在绘制的时候,将图片的 alpha 值乘以像素的 alpha 值即可
$\alpha{\text{final}} = \alpha{\text{global}} \times \alpha_{\text{pixel}}$
图片的简单缩放
Nearest Neighbor (最近邻插值)
- 原理:选择最靠近目标像素位置的源像素值
- 优点:计算简单,速度快
- 缺点:图像质量较差,尤其在放大时容易出现明显的像素块效果,不适合高质量的图像缩放
Bilinear Interpolation (双线性插值)
- 原理:基于目标像素四个最近邻点的加权平均,权重取决于距离
- 优点:相比最近邻插值,质量较好,能提供平滑的缩放效果
- 缺点:放大图像时可能出现模糊,计算量比最近邻插值大
Bicubic Interpolation (双三次插值)
- 原理:使用16个相邻像素进行插值,提供比双线性插值更平滑的结果
- 优点:图像质量较好,边缘更平滑
- 缺点:计算量较大,相对较慢。可能会引入轻微的环形伪影
Lanczos Resampling
- 原理:使用 sinc 函数的一个窗口化版本作为插值函数,常用窗口大小为3或5
- 优点:提供非常高的图像质量,尤其适合图像缩放
- 缺点:计算复杂度高,处理速度慢。对于特定类型的图像数据可能会产生振铃效应
Fourier Transform Method
- 原理:通过对图像进行傅立叶变换,编辑频域数据后进行逆变换
- 优点:理论上可以在频域内进行完美的缩放
- 缺点:实际应用复杂,需要处理边缘效应。处理速度慢,不适合实时应用
Area Sampling
- 原理:考虑图像缩放过程中像素覆盖的区域,平均这些区域的颜色值
- 优点:能够更好地保持图像的总体亮度,尤其适用于缩小图像
- 缺点:实现相对复杂,计算量较大
Pyramid Reduction
- 原理:逐步缩小图像,每次减少一定比例,直到达到目标大小
- 优点:对于大幅度缩小的情况,可以提供较好的结果
- 缺点:需要多步处理,可能导致计算量大增
以最近邻插值为例,对于目标图像中的每个像素点,根据缩放比例计算它在原始图像中的对应坐标。如果目标图像比原始图像大,这通常涉及到一个除法操作;如果目标图像更小,则涉及到乘法操作
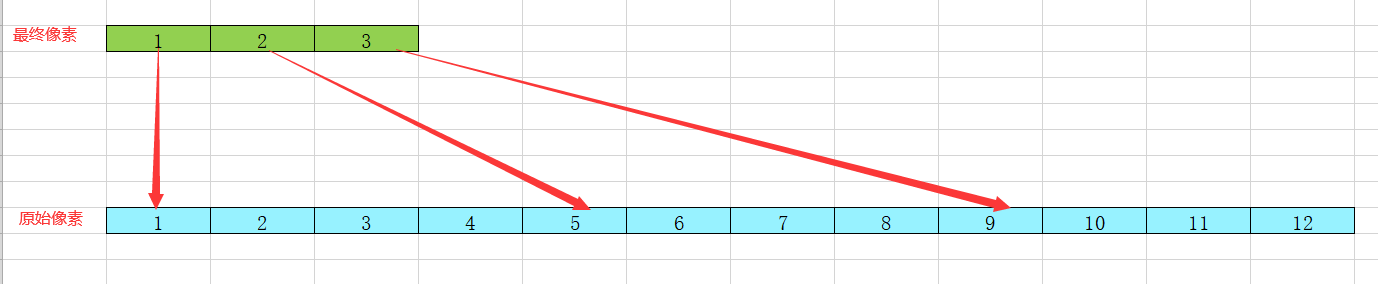
如上图所示,蓝色为原始像素,绿色为计算后的像素。也就是说这里是一个缩小图片的计算过程。
Image* Image::zoomImage(const Image* inImage, float inZoomX, float inZoomY)
{
int width = inImage->GetWidth() * inZoomX;
int height = inImage->GetHeight() * inZoomY;
byte* data = new byte[width * height * sizeof(RGBA)];
for (int x = 0; x < width; ++x) {
for (int y = 0; y < height; ++y) {
int imageX = (float)x / inZoomX;
int imageY = (float)y / inZoomY;
imageX = imageX < inImage->GetWidth() ? imageX : inImage->GetWidth() - 1;
imageY = imageY < inImage->GetHeight() ? imageY : inImage->GetHeight() - 1;
RGBA color = inImage->GetColor(imageX, imageY);
memcpy(data + (x + y * width) * sizeof(RGBA), &color, sizeof(RGBA));
}
}
Image* newImage = new Image(width, height, data);
delete[] data;
data = nullptr;
newImage->setAlpha(inImage->getAlpha());
return newImage;
}
最近邻插值其实就是很简单的坐标映射,根据坐标计算将缩放后的图片像素映射到源图片上

上图中左下角为原图片,右上角为放大后的图片,很明显发现锯齿感,放大后图片失真严重,有明显像素块的感觉
双线性插值处理图片缩放

以上图为例,(x1, y1)、(x2, y1)、(x1, y2)、(x2, y2) 为原图像素点的坐标,红色为缩放后的图片坐标通过计算映射的点,很可能是 float
根据 disX1、disX2 和 (x1, y1) 、(x2, y1) 插值计算出红点上下两点的值;根据 disY1、disY2 和 红点上下两点的值插值计算出红点的值
需要注意一点,对于 (x1, y1) 和 (x2, y1) 来说, (x1, y1) 的权重是 disX2, (x2, y1) 的权重是 disX1,因为离目标点越近,权重越高,对颜色影响程度越深
- $\text{Color}_{x, y1} = f(x1, y1) \times (1 - dx) + f(x2, y1) \times dx$
- $\text{Color}_{x, y2} = f(x1, y2) \times (1 - dx) + f(x2, y2) \times dx$
- $\text{Color}{x, y} = \text{Color}{x, y1} \times (1 - dy) + \text{Color}_{x, y2} \times dy$
for (int i = 0;i < _width;i++)
{
coordX = (float)i / _zoomX;
x1 = (int)coordX;
if (x1 >= _image->getWidth() - 1)
{
x1 = _image->getWidth() - 1;
x2 = x1;
}
else
{
x2 = x1 + 1;
}
disX1 = coordX - x1;
disX2 = 1.0 - disX1;
for (int j = 0; j < _height; j++)
{
coordY = (float)j / _zoomY;
y1 = (int)coordY;
if (y1 >= _image->getHeight() - 1)
{
y1 = _image->getHeight() - 1;
y2 = y1;
}
else
{
y2 = y1 + 1;
}
disY1 = coordY - y1;
disY2 = 1.0 - disY1;
RGBA _color11 = _image->getColor(x1, y1);
RGBA _color12 = _image->getColor(x1, y2);
RGBA _color21 = _image->getColor(x2, y1);
RGBA _color22 = _image->getColor(x2, y2);
RGBA _targetColor;
_targetColor.m_r = (float)_color11.m_r * disX2 * disY2 +
(float)_color12.m_r * disX2 * disY1 +
(float)_color21.m_r * disX1 * disY2 +
(float)_color22.m_r * disX1 * disY1;
_targetColor.m_g = (float)_color11.m_g * disX2 * disY2 +
(float)_color12.m_g * disX2 * disY1 +
(float)_color21.m_g * disX1 * disY2 +
(float)_color22.m_g * disX1 * disY1;
_targetColor.m_b = (float)_color11.m_b * disX2 * disY2 +
(float)_color12.m_b * disX2 * disY1 +
(float)_color21.m_b * disX1 * disY2 +
(float)_color22.m_b * disX1 * disY1;
_targetColor.m_a = (float)_color11.m_a * disX2 * disY2 +
(float)_color12.m_a * disX2 * disY1 +
(float)_color21.m_a * disX1 * disY2 +
(float)_color22.m_a * disX1 * disY1;
memcpy(_data + (j * _width + i) * sizeof(RGBA), &_targetColor, sizeof(RGBA));
}
}

对比普通的最近邻插值计算效果,使用双线性插值的图片效果更好,但是相对的计算量也更大
UV纹理坐标引入及三角形贴图
UV坐标系是在计算机图形学中用于纹理映射的二维坐标系统。通常,当将二维图像(纹理)映射到三维模型的表面时使用UV坐标系。在UV坐标系中,U 通常表示水平轴,而 V 表示垂直轴。这种坐标系统通过规范化坐标,将纹理图像的每个点(像素)与三维模型表面的特定点相关联
在三维建模软件中,每个模型的表面都可以被展开或展平成一个二维平面。在这个平面上,艺术家可以定义模型上每个顶点的UV坐标。这些坐标决定了三维模型曲面上的每一点对应纹理图像的哪一部分
当UV坐标超出0到1的范围时,可以设置纹理的重复(tiling)或包裹(wrapping)行为。例如,U或V坐标为1.5时,纹理可以设置为重复,使得纹理在每个方向上重复出现
- U坐标:对应于纹理图像的水平方向。U = 0 表示纹理的左边缘,U = 1 表示纹理的右边缘
- V坐标:对应于纹理图像的垂直方向。V = 0 表示纹理的底部,V = 1 表示纹理的顶部

以上图为例,黄色为图片,使用 UV 坐标系;红色为三角形模型。将黄色贴图贴到三角形模型上,使用 UV 坐标系,那么三角形左底顶点对应的 UV 坐标就是 (0,0),三角形右底顶点对应的 UV 坐标就是 (1, 0),三角形上顶点对应的 UV 坐标就是 (0.5, 1)
以上顶点为例,该点的颜色就是贴图中 $X = U*Width{image}, Y = V*Height{image}$ 像素点的颜色
于是我们给点增加新的属性 m_uv 用与标记该点在贴图中的 UV 坐标
struct Point
{
public:
int m_x;
int m_y;
RGBA m_color;
floatV2 m_uv;
}
同时还要给图片提供一个新的接口 GetColorByUV 用与通过 UV 坐标获得对应的颜色
RGBA Image::GetColorByUV(floatV2 inUV) const
{
int x = inUV.x * GetWidth();
int y = inUV.y * GetHeight();
return GetColor(x, y);
}
然后添加在 Canvas 添加一个标记位用与标记是否启用贴图
bool m_enableTexture = true; // 是否启用纹理贴图
Image* m_texture{ nullptr }; // 绘制剩下顶点的时候 使用那种图片
在绘制多边形的时候可以通过设置顶点的 UV 坐标,进而知道绘制的颜色,三角形内像素的 UV 通过顶点的 UV 插值可以计算,与三角形内像素的颜色可以通过三顶点颜色插值计算出来一样
// UV 插值
inline floatV2 Canvas::uvLerp(const floatV2 inUV1, floatV2 inUV2, float inScale)
{
floatV2 result;
result.x = inUV1.x + (inUV2.x - inUV1.x) * inScale;
result.y = inUV1.y + (inUV2.y - inUV1.y) * inScale;
return result;
}
通过 UV 插值计算得到三角形内像素的 UV,就可以通过 UV 获得贴图的颜色,进而设置到像素上
RGBA pointColor;
if (m_enableTexture && m_texture != nullptr) {
// 开启贴图 并且贴图有效 使用贴图颜色
floatV2 uv = uvLerp(pt1.m_uv, pt2.m_uv, (float)index / sumStep);
pointColor = m_texture->GetColorByUV(uv);
}
else {
pointColor = colorLerp(pt1.m_color, pt2.m_color, (float)index / sumStep);
}
drawPoint(Point(xNow, yNow, pointColor));
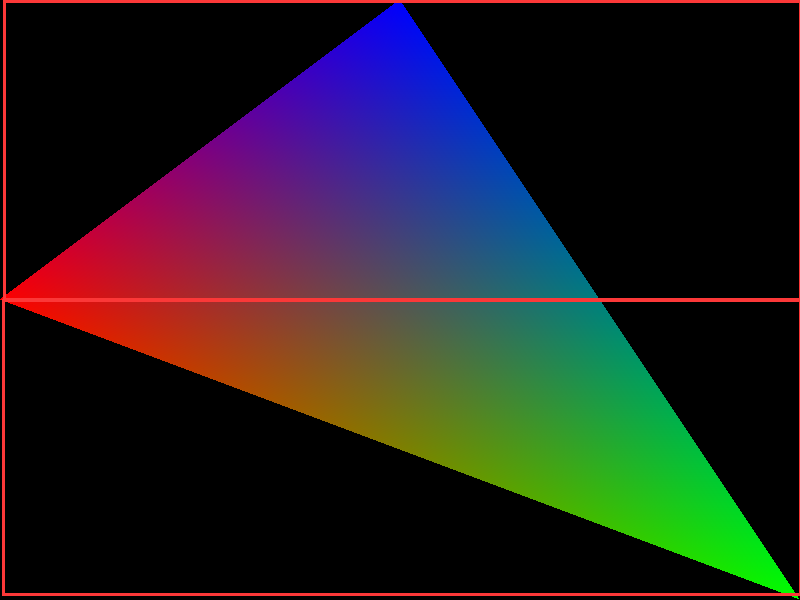
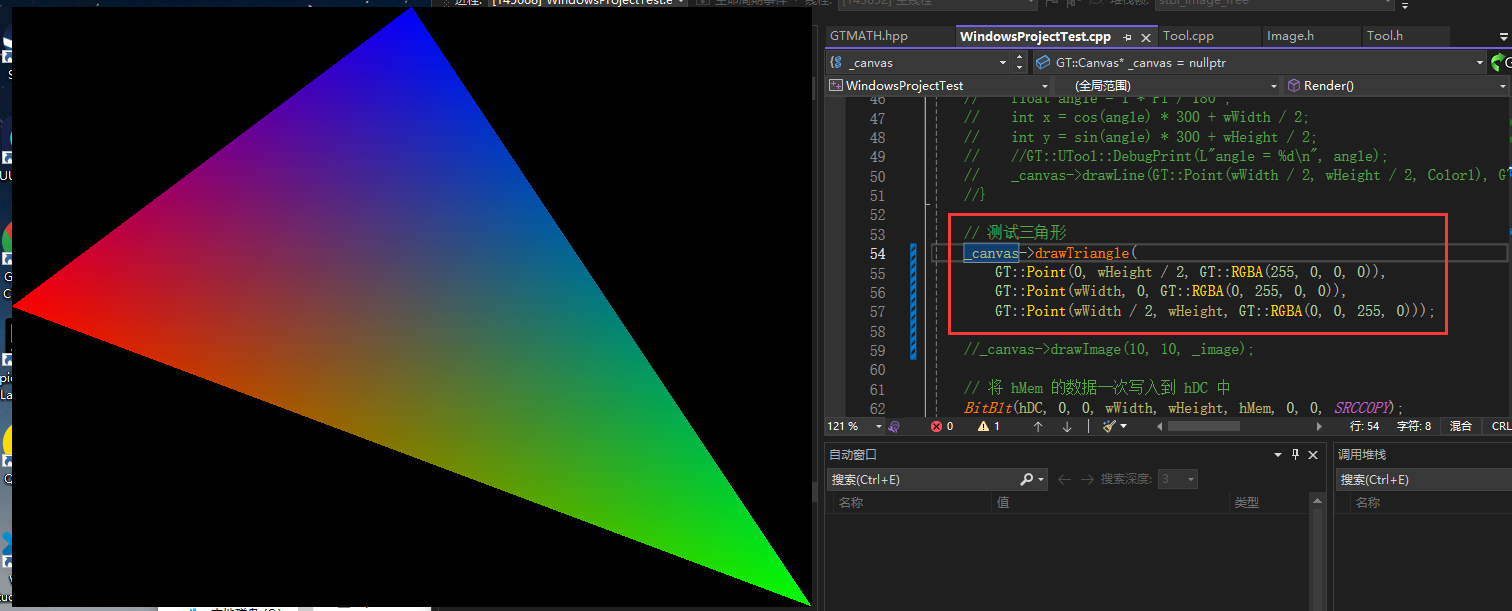
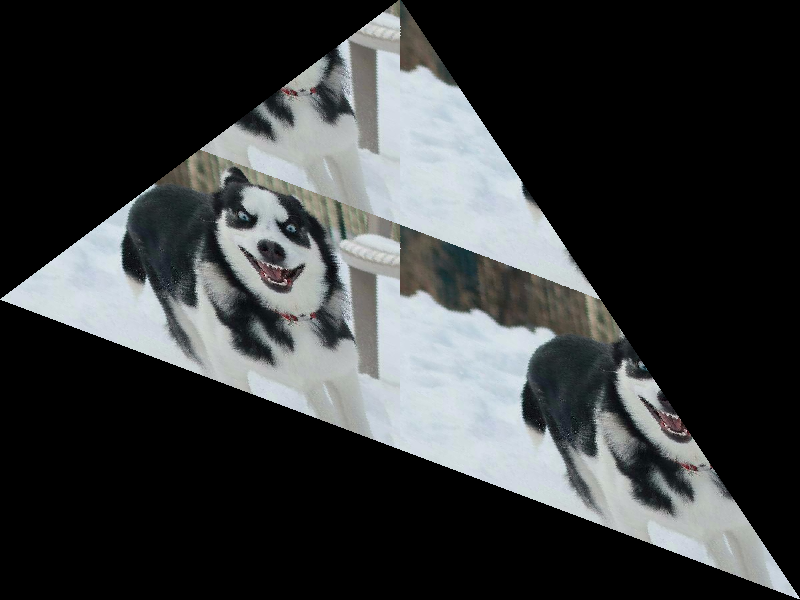
设置顶点信息,设置贴图后,绘制三角形
_canvas->bindTexture(_bgImage);
_canvas->enableTexture(true);
_canvas->drawTriangle(
GT::Point(0, wHeight / 2, GT::RGBA(), GT::floatV2(0, 0)),
GT::Point(wWidth, 0, GT::RGBA(), GT::floatV2(1, 0)),
GT::Point(wWidth / 2, wHeight, GT::RGBA(), GT::floatV2(0.5, 1))
);
| 原图 | 贴图 |
|---|---|
 |
 |
如果纹理坐标 UV 值大于 1,有三种解决方案
纹理重复(Tiling or Wrapping)
- 纹理重复是一种常见的处理方式,当UV坐标超过1时,纹理在模型上重复出现。这就像纹理图像在每个方向上都被平铺了:
- 水平重复:当U坐标大于1时,纹理在水平方向上重复。例如,U坐标为1.2时,显示的是原始纹理的20%和80%的重复部分
- 垂直重复:当V坐标大于1时,纹理在垂直方向上重复。例如,V坐标为2.3时,纹理将完整地重复两次,第三次显示30%的初始部分
纹理钳制(Clamping)
- 纹理钳制是另一种处理UV坐标超界的方法。在这种模式下,纹理的边缘像素会被拉伸以填充超出[0, 1]范围的区域:
- 如果U或V坐标小于0,它将被设置为0
- 如果U或V坐标大于1,它将被设置为1
- 结果是,纹理边缘的最后一个像素被延伸到模型的剩余部分
- 这种方法适用于你不希望纹理在模型上重复的情况,常见于需要清晰边界的纹理映射,如墙面、地板或其他需要明确边缘的场景。
纹理镜像(Mirrored Repeat)
- 纹理镜像是一种特殊的重复处理方式,当UV坐标超过1时,纹理会镜像翻转而不是简单地重复:
- 这意味着每次纹理坐标超过一个整数值时(例如,从1到2,从2到3),纹理图像都会被翻转(镜像)
- 这种方式可以避免普通重复可能带来的可见接缝,提供更自然的视觉过渡
- 纹理重复:适用于需要连续无缝纹理的场景,如地板砖、墙纸或任何需要连续图案的表面
- 纹理钳制:适合那些纹理边缘需要明确显示的模型,如画框、屏幕边界等
- 纹理镜像:适用于需要避免可见接缝而又不希望简单重复纹理的场景,如服装、家具布料等
RGBA Image::GetColorByUV(floatV2 inUV, TEXTURE_TYPE inType) const
{
int x = inUV.x * m_Width;
int y = inUV.y * m_Height;
switch (inType)
{
case GT::Image::TX_CLAMP_TO_EDGE:
x = GT::UTool::clamp(x, 0, m_Width - 1);
y = GT::UTool::clamp(y, 0, m_Height - 1);
break;
case GT::Image::TX_REPEAT:
x %= m_Width;
y %= m_Height;
break;
default:
break;
}
return GetColor(x, y);
}
只需要在计算坐标的时候根据不同的情况对坐标做一些修改即可
_canvas->drawTriangle(
GT::Point(0, wHeight / 2, GT::RGBA(), GT::floatV2(0, 0)),
GT::Point(wWidth, 0, GT::RGBA(), GT::floatV2(2, 0)),
GT::Point(wWidth / 2, wHeight, GT::RGBA(), GT::floatV2(1, 2))
);
| 纹理重复 | 纹理钳制 |
|---|---|
 |
 |
对于贴图来说,我们会发现如果三角形过大,出现与图片放大时使用最近邻插值算法一样的锯齿情况,这是因为我们在通过 UV 坐标计算像素颜色时的方式与图片放大最近邻算法相似,同理我们可以在这里使用双线性插值的算法优化贴图计算
图形学状态机接口封装
什么是状态机
- 记录状态参数
- 信息记录:顶点信息、Image信息等
- 状态记录:是否启用 Blender 等
- 更改状态参数
- 一开始绑定 A 贴图绘制三角形,随后绑定 B 贴图绘制另一个三角新
- 使用状态参数做事
- 根据设定的状态参数,绘制对应内容
也就是主要状态参数设置的对,具体如何做交给对应的模块去做就行
// OpenGL 中的状态机设置
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glEnable(GL_CULL_FACE);
glEnable(GL_TEXTURE_2D);
glIsEnabled(GL_DEPTH_TEST);
glIsEnabled(GL_BLEND);
glIsEnabled(GL_CULL_FACE);
glIsEnabled(GL_TEXTURE_2D);
性能优化
- 状态机模型允许
OpenGL在运行时高效管理和修改状态。由于状态一旦设定,除非明确改变,否则会一直保持,这减少了重复设置相同状态的需要,从而提高了图形渲染的效率。例如,设定纹理、着色器或渲染参数后,可以连续渲染多个对象,而不需要每次渲染时都重新设置这些参数
- 状态机模型允许
简化 API 设计
- 通过使用状态机,
OpenGLAPI能够通过一系列的简单命令来控制复杂的渲染操作。这样的设计使得API相对简洁,用户只需要更改与当前任务相关的状态即可,而不用在每次调用绘图函数时提供所有的细节
- 通过使用状态机,
增加灵活性
- 状态机模型使开发者能够精确控制渲染流程中的各个方面,可以细粒度地调整图形的每个属性,如颜色、材质、灯光和阴影等。这种控制的灵活性对于开发高质量的图形应用是非常重要的
减少状态改变的开销
- 在图形渲染过程中,频繁地改变状态是一项耗费性能的操作。通过维护一个持续的状态环境,可以最小化状态变化的次数,从而减少
CPU和GPU之间的通信开销,提高整体性能
- 在图形渲染过程中,频繁地改变状态是一项耗费性能的操作。通过维护一个持续的状态环境,可以最小化状态变化的次数,从而减少
GT::Point ptArray[] =
{
{0.0f,0.0f, GT::RGBA(255,0,0) , GT::floatV2(0,0)},
{300.0f,0.0f, GT::RGBA(0,255,0) , GT::floatV2(1.0,0)},
{300.0f,300.0f, GT::RGBA(0,0,255) , GT::floatV2(1.0,1.0)},
{300.0f,0.0f, GT::RGBA(255,0,0) , GT::floatV2(1.0f,.0f)},
{300.0f,300.0f, GT::RGBA(0,255,0) , GT::floatV2(.0f,.0f)},
{600.0f,500.0f, GT::RGBA(0,0,255) , GT::floatV2(.0f,1.0f)},
};
//_canvas->drawTriangle(ptArray[3], ptArray[4], ptArray[5]);
_canvas->gtVertexPointer(2, GT::GT_FLOAT, sizeof(GT::Point), (GT::byte*)ptArray);
_canvas->gtColorPointer(1, GT::GT_FLOAT, sizeof(GT::Point), (GT::byte*)&ptArray[0].m_color);
_canvas->gtTexCoordPointer(1, GT::GT_FLOAT, sizeof(GT::Point), (GT::byte*)&ptArray[0].m_uv);
_canvas->enableTexture(true);
_canvas->setTextureType(GT::Image::TX_REPEAT);
_canvas->bindTexture(_bgImage);
_canvas->gtDrawArray(GT::GT_TRIANGLE, 0, 6);

参考上面的图片,结合前面新封装接口的代码,理解对 ptArray 操作的原理
对于 Point 对象来说,它的大小是 sizeof(Point) 字节
- 让
ptArray + sizeof(Point)就指向了数组中下个Point对象 - 让
colorStart + sizeof(Point)就直接指向了数组中下一个Point对象的RGBA color数据 - 让
uvStart + sizeof(Point)就直接指向了数组中下一格Point对象的floatV2 uv数据
对于
char* ptr来说,ptr + 1就是指针向后位移一个char大小,也就是一个字节
对于int* ptr来说,ptr + 1就是指针向后位移一个int大小的,可能是四个字节
所以,程序中想要获取 ptArray 中所有的数据,可以直接
for (int i = 0; i < inCount; i++)
{
float* vertexDataFloat = (float*)vertexData;
pt0.m_x = vertexDataFloat[0];
pt0.m_y = vertexDataFloat[1];
vertexData += m_State.m_vertextData.m_stride;
vertexDataFloat = (float*)vertexData;
pt1.m_x = vertexDataFloat[0];
pt1.m_y = vertexDataFloat[1];
vertexData += m_State.m_vertextData.m_stride;
//取颜色坐标
RGBA* colorDataRGBA = (RGBA*)colorData;
pt0.m_color = colorDataRGBA[0];
colorData += m_State.m_colorData.m_stride;
colorDataRGBA = (RGBA*)colorData;
pt1.m_color = colorDataRGBA[0];
colorData += m_State.m_colorData.m_stride;
drawLine(pt0, pt1);
}
就顶点信息来说,由于数据类型是 float,所以将源数据强制装换成 vertexDataFloat = (float*)vertexData,那么 vertexDataFloat[0] 对应的就是 m_x, vertexDataFloat[1] 对应的就是 m_y,那么下一个 Point 的 m_x、m_y 对应的起始坐标就是 vertexData += m_State.m_vertextData.m_stride,这里 m_State.m_vertextData.m_stride 就是 `sizeof(Point)
至于颜色信息和 UV 信息同理,都是通过起始地址和地址偏移直接计算的
