
图形学.md 34 KB
为什么要学习计算机图形学?——计算机图形学就是厉害
图形学是非常广阔的世界
前提知识
- 基础数学
- 基础物理
- 信号处理
- 数值分析
- 美学
- ……
线性代数
向量、矩阵的操作,点乘、叉乘、矩阵乘法等
点乘
$$ \vec{A} = (^{x} _{y}) \ \vec{A}^T = (x, y) \ \lVert \vec{A} = \sqrt{x ^2 + y^2} \rVert \ $$
向量之间的点乘
$$ \vec{A} \cdot \vec{B} = \lVert \vec{A} \rVert * \lVert \vec{B} \rVert * \cos \theta \ \cos \Theta = \frac{\vec{A} \cdot \vec{B}}{\lVert \vec{A} \rVert * \lVert \vec{B} \rVert} $$
向量点乘的数学运算规则
- 交换律:$\vec{a} \cdot \vec{b} = \vec{b} \cdot \vec{a}$
- 分配律:$\vec{a} \cdot (\vec{b} + \vec{c}) = \vec{a} \cdot \vec{b} + \vec{a} \cdot \vec{c}$
- 结合律:$(k*\vec{a}) \cdot \vec{b} = \vec{a} \cdot (\vec{b} * k) = k * (\vec{a} \cdot \vec{b})$
点乘的运算
- 2D: $\vec{a} \cdot \vec{b} = (^{x_a} _{y_a}) \cdot (^{x_b} _{y_b}) = x_a*x_b + y_a*y_b $
- 3D: $\vec{a} \cdot \vec{b} = \begin{pmatrix}x_a \ y_a \ z_a\end{pmatrix} \cdot \begin{pmatrix} x_b \ y_b \ y_c \end{pmatrix} = x_a * x_b + y_a * y_b + z_a * z_b$
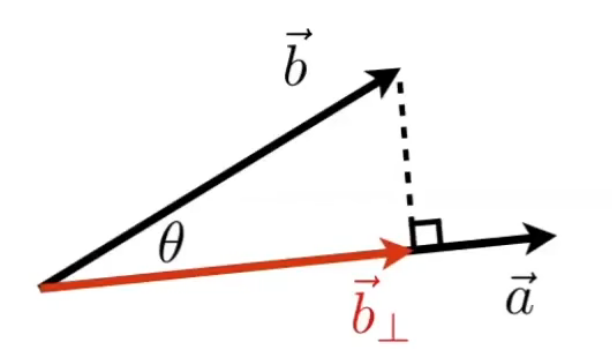
$$ \vec{b{\bot}} = \lVert \vec{b\bot} \rVert = \lVert \vec{b} \rVert * \cos \Theta $$

方向大致相同:$\cos{(\vec{a} \backsim \vec{b})} < 0$
方向不同:$\cos{(\vec{a} \backsim \vec{c})} > 0$
- 向量点乘的作用(单位向量)
- 通过点乘的运算,可以找到两个方向之间的余弦夹角
- 找到一个向量投影到另一个向量中,也会用到点乘运算
- 判断两个向量是否接近,通过值的大小比较即可(cos在0~$\pi$单调递减)
- 关于是否同方向的信息($\cos \theta$小于$90°$大于0,否则小于0)
- 通过点乘的运算,可以找到两个方向之间的余弦夹角
叉乘
两个向量叉乘的结果是垂直于当前两个向量所在平面的新的向量
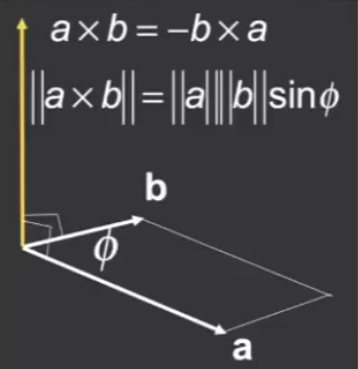
$$ \vec{a} \times \vec{b} = -\vec{b} \times \vec{a}\ \lVert \vec{a} \times \vec{b} \rVert = \lVert \vec{a} \rVert * \lVert \vec{b} \rVert * \sin{\Theta} $$
叉乘的运算需要用到右手螺旋法则,$\vec{a} \times \vec{b}$就是四指从$\vec{a}$到$\vec{b}$,那么大拇指的指向就是$\vec{c}$所在的方向
叉乘的一些数学运算规律
- 叉乘没有交换律
- 叉乘有分配律
- 叉乘有结合律
$$ \vec{x} \times \vec{y} = + \vec{z}\ \vec{y} \times \vec{x} = - \vec{z}\ \vec{y} \times \vec{z} = + \vec{x}\ \vec{z} \times \vec{y} = - \vec{x}\ \vec{z} \times \vec{x} = + \vec{y}\ \vec{z} \times \vec{x} = - \vec{y}\ \vec{a} \times \vec{b} = -\vec{b} \times \vec{a}\ \vec{a} \times \vec{a} = \vec{0}\ \vec{a} \times (\vec{b} + \vec{c}) = \vec{a} \times \vec{b} + \vec{a} \times \vec{c}\ \vec{a} \times (k * \vec{b}) = k * (\vec{a} \times \vec{b})\ $$
上述所有都基于右手坐标系
叉乘没有交换律
叉乘的数学计算方式
$$ \vec{a} \times \vec{b} = \begin{pmatrix}
y_a * z_b - y_b * z_a \\
z_a * x_b - x_a * z_b \\
x_a * y_b - y_a * x_b \\
\end{pmatrix} $$
- 叉乘的作用
- 判断左右(根据右手螺旋法则)
- 判断内外(点是否在三角形内的叉乘解法)
矩阵
矩阵和一个数相乘
$$ k * \begin{pmatrix}
x & a \\
y & b \\
z & c \\
\end{pmatrix} = \begin{pmatrix}
k*x & k*a \\
k*y & k*b \\
k*z & k*c \\
\end{pmatrix} $$
矩阵和一个矩阵相乘
A矩阵的列数必须等于B矩阵的行数
$\left( M \times N \right) * \left( N \times P \right) = \left( M \times N \right)$公式中$\left( M \times N \right)$表示M行、N列的矩阵
$$ \begin{pmatrix}
x_1 & a_1 \\
y_1 & b_1 \\
z_1 & c_1 \\
\end{pmatrix}* \begin{pmatrix}
x_2 & a_2 & q_2 & e_2 \\
y_2 & b_2 & w_2 & r_2 \\
\end{pmatrix}= \begin{pmatrix}
x_1 * x_2 + a_1 * y_2 & x_1 * a_2 + a_1 * b_2 & x_1 * q_2 + a_1 * w_2 & x_1 * e_2 + a_1 * r_2 \\
y_1 * x_2 + b_1 * y_2 & y_1 * a_2 + b_1 * b_2 & y_1 * q_2 + b_1 * w_2 & y_1 * e_2 + b_1 * r_2 +\\
z_1 * x_2 + c_1 * y_2 & z_1 * a_2 + c_1 * b_2 & z_1 * q_2 + c_1 * w_2 & z_1 * e_2 + c_1 * r_2 \\
\end{pmatrix} $$
- 矩阵的数学规律
- 矩阵没有交换律
- 矩阵有结合律$(AB)C = A(BC)$
- 矩阵具有分配律$A(B+C) = AB + AC$
当矩阵与向量相乘时,一般将矩阵放在左边,向量放在右边,向量可以看作是(M, 1)的矩阵,那么左边的矩阵只要是M列就行
将单位向量按y轴对称的操作: $$ \begin{bmatrix}
-1 & 0 \\
0 & 1
\end{bmatrix} * \begin{bmatrix}
x\\
y
\end{bmatrix}= \begin{bmatrix}
-x \\
y
\end{bmatrix} $$
矩阵的转置:行和列互换
$$ \begin{bmatrix}
1 & 2 \\
3 & 4 \\
5 & 6
\end{bmatrix} ^T = \begin{bmatrix}
1 & 3 & 5 \\
2 & 4 & 6
\end{bmatrix} \ (AB)^T = B^T * A^T $$
单位矩阵:主对角线上是1,其他地方都是0
$$ I_{3\times3} = \begin{bmatrix}
1 & 0 & 0 \\
0 & 1 & 0 \\
0 & 0 & 1
\end{bmatrix} $$
矩阵的逆:矩阵A乘矩阵B得到单位矩阵,则成B是A的逆,写作$A^{-1}$
$AA^{-1} = I$、$(AB)^{-1} = B^{-1} * A^{-1}$
向量的点乘转成矩阵运算
$$ \vec{a} \cdot \vec{b} = \vec{a}^T\vec{b}= \begin{bmatrix}
x_a & y_a & z_a
\end{bmatrix} \begin{bmatrix}
x_b \\ y_b \\ z_b
\end{bmatrix}= \left( x_a*x_b + y_a*y_b + z_a*z_b \right) $$
向量的叉乘转成矩阵运算
$$ \vec{a} \times \vec{b} = A^*\vec{b} = \begin{bmatrix}
0 & -z_a & y_a \\
z_a & 0 & -x_a \\
-y_a & x_a & 0
\end{bmatrix} \begin{bmatrix}
x_b \\ y_b \\ z_b
\end{bmatrix} $$
$A^*$是$\vec{a}$的dual matrix
变换
仿射变换
伸缩变换(Scale)
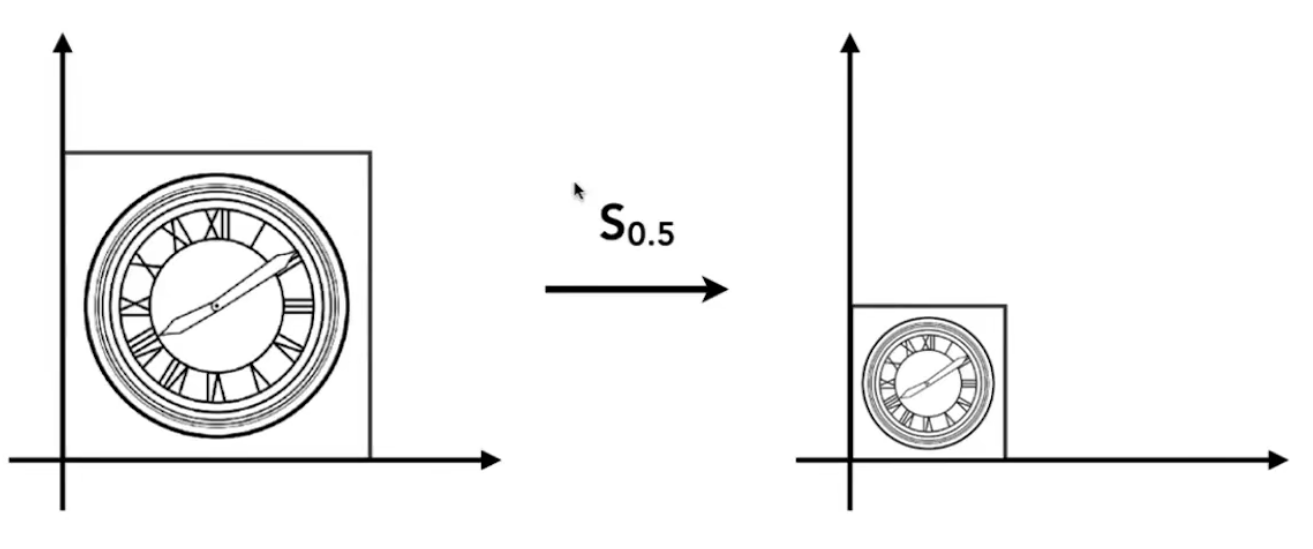
$$ x' = sx\ y' = sy\ \Rightarrow \ \begin{bmatrix}
x' \\ y'
\end{bmatrix}= \begin{bmatrix}
s & 0 \\
0 & s
\end{bmatrix} \begin{bmatrix}
x \\ y
\end{bmatrix} $$
镜像
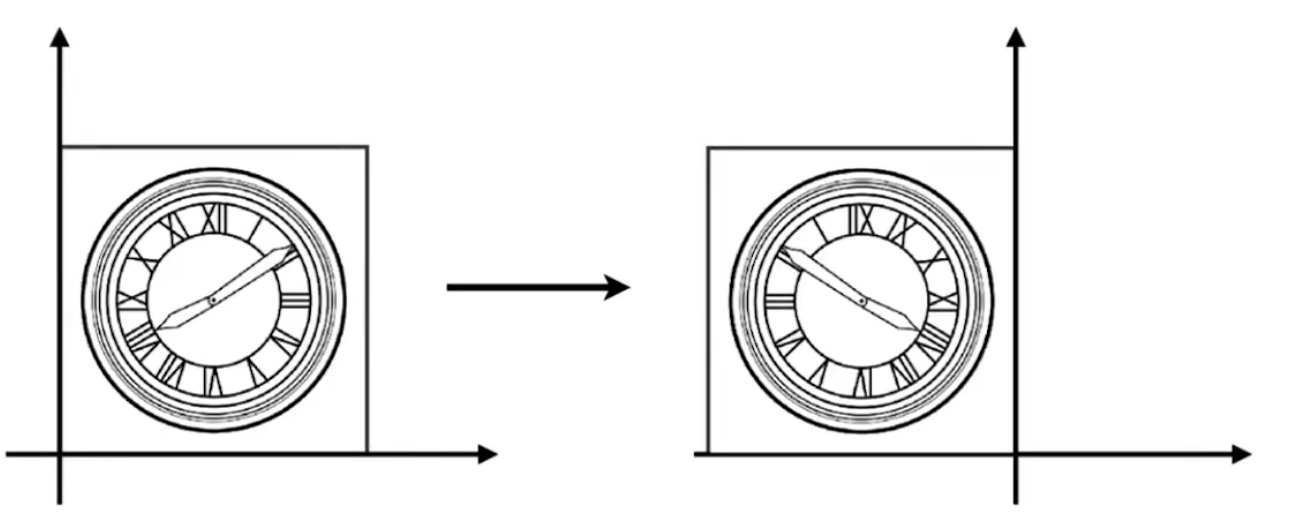
$$ x' = -x\ y' = y\ \Rightarrow \ \begin{bmatrix}
x' \\ y'
\end{bmatrix}= \begin{bmatrix}
-1 & 0 \\
0 & 1
\end{bmatrix} \begin{bmatrix}
x \\ y
\end{bmatrix} $$
切变
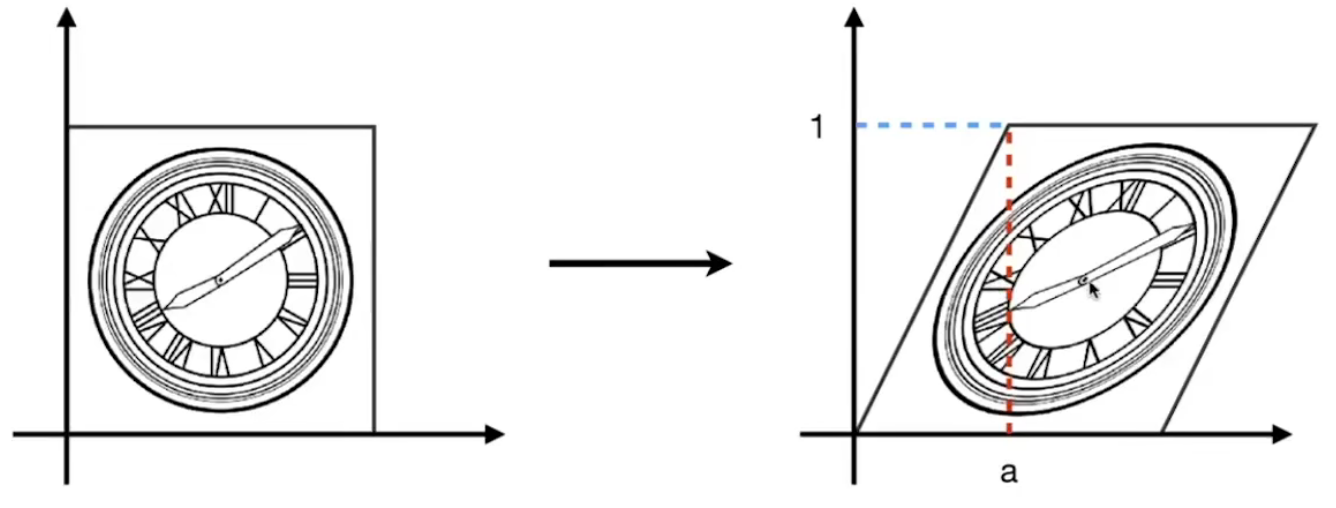
$$ x' = x + a*y\ y' = y\ \Rightarrow \ \begin{bmatrix}
x' \\ y'
\end{bmatrix}= \begin{bmatrix}
1 & a \\
0 & 1
\end{bmatrix} \begin{bmatrix}
x \\ y
\end{bmatrix} $$
旋转(Rotate)
默认绕原点逆时针旋转
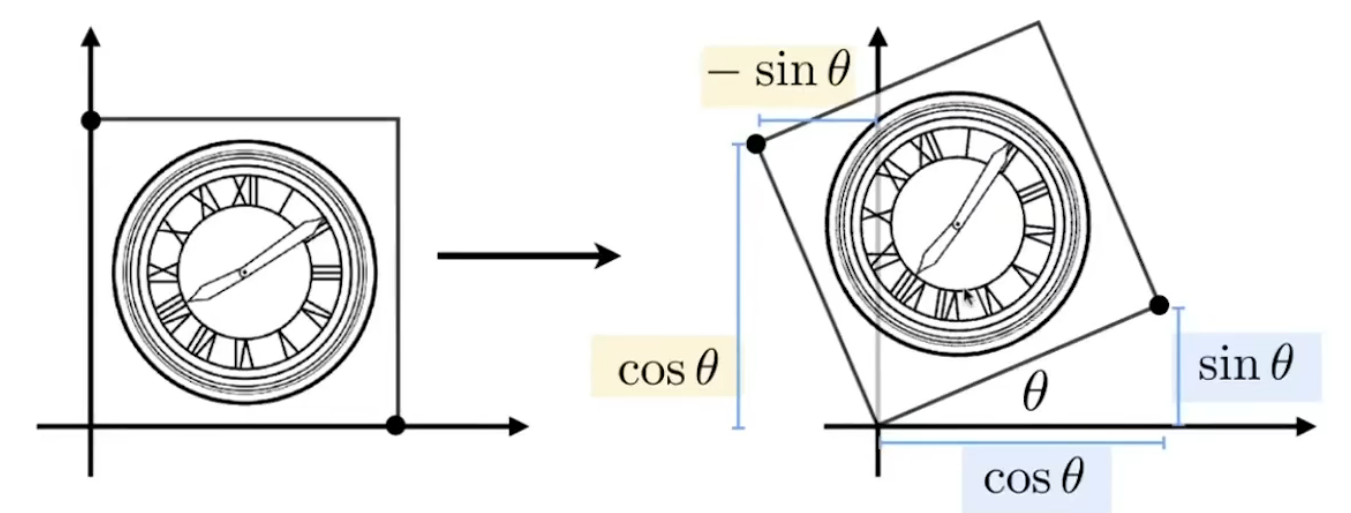
公式推导
- 右下角点坐标(1, 0)=>($\cos\Theta, \sin\Theta$)
- 左上角点坐标(0, 1)=>($-\sin\Theta, \cos\Theta$)
$$ \left(x', y'\right) \Longrightarrow \begin{bmatrix}
A & B \\
C & D
\end{bmatrix} \begin{bmatrix}
x \\ y
\end{bmatrix}\ 带入x=1, y=0, x'=\cos\Theta, y'=\sin\Theta\ 得: A = \cos\Theta , C = \sin\Theta\ 带入x=0, y=1, x'=-\sin\Theta, y'=\cos\Theta\ 得: B = -\sin\Theta, D = \cos\Theta $$
平移(Transiation)
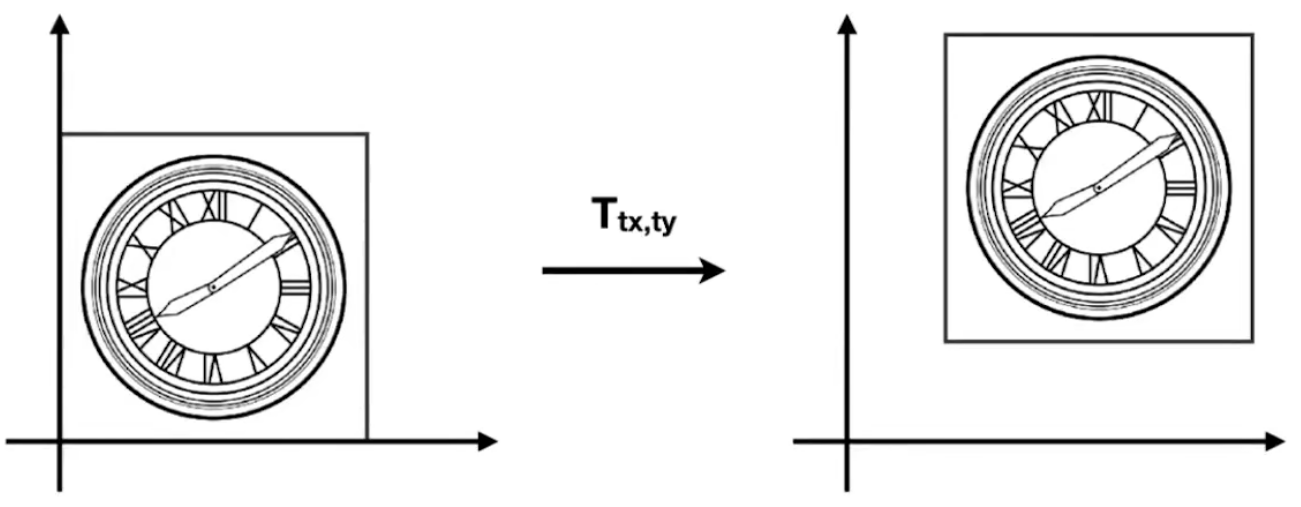
- $x' = x + t_x$
- $y' = y + t_y$
$$ \begin{bmatrix}
x' \\ y ^ `
\end{bmatrix}= \begin{bmatrix}
1 & 0 \\
0 & 1
\end{bmatrix} \begin{bmatrix}
x \\ y
\end{bmatrix}+ \begin{bmatrix}
t_x \\ t_y
\end{bmatrix} $$
很明显,这个平移的坐标无法通过一个矩阵就表示出来,这个时候就需要引入齐次矩阵
齐次矩阵就是将一个原本是n维的向量用一个n+1维向量来表示
$$ \begin{bmatrix}
x' \\ y ^ ` \\ 1
\end{bmatrix}= \begin{bmatrix}
1 & 0 & t_x \\
0 & 1 & t_y \\
0 & 0 & 1
\end{bmatrix} \begin{bmatrix}
x \\ y \\ 1
\end{bmatrix}= \begin{bmatrix}
x + t_x \\ y + t_y \\ 1
\end{bmatrix} $$
通过齐次坐标矩阵就可以使用一个矩阵来表示线性变换,为了保证变换矩阵的一致性,所以上面讲的所有矩阵都需要转换成齐次矩阵
在其次坐标中,点使用$\begin{pmatrix}
x \\ y \\ 1
\end{pmatrix}$ 来表示,向量使用$\begin{pmatrix}
x \\ y \\ 0
\end{pmatrix}$ 来表示
- 向量 + 向量 = 向量
- point - point = 向量
- point + vector = point
- point + point = 两点的中点
为什么point + point的结果是两个点的中点
$$ A = \begin{pmatrix}
x \\ y \\ w
\end{pmatrix}= \begin{pmatrix}
x / w \\ y / w \\ 1
\end{pmatrix} \ B = \begin{pmatrix}
a \\ b \\ c
\end{pmatrix}= \begin{pmatrix}
a / c \\ b / c \\ 1
\end{pmatrix} \ A + B = \begin{pmatrix}
x/w + a/c \\ y/w + b/c \\ 2
\end{pmatrix}= \begin{pmatrix}
\frac{x}{2w} + \frac{a}{2c} \\
\frac{y}{2w} + \frac{b}{2c} \\
1
\end{pmatrix} $$
总和
$$ Scale \Longrightarrow S(s_x, s_y) = \begin{pmatrix}
s_x & 0 & 0 \\
0 & s_y & 0 \\
0 & 0 & 1
\end{pmatrix} \ Rotation \Longrightarrow R(\Theta) = \begin{pmatrix}
\cos\Theta & -\sin\Theta & 0 \\
\sin\Theta & \cos\Theta & 0 \\
0 & 0 & 1
\end{pmatrix} \ Translation \Longrightarrow T(t_x, t_y) = \begin{pmatrix}
1 & 0 & t_x \\
0 & 1 & t_y \\
0 & 0 & 1
\end{pmatrix} $$
逆变换
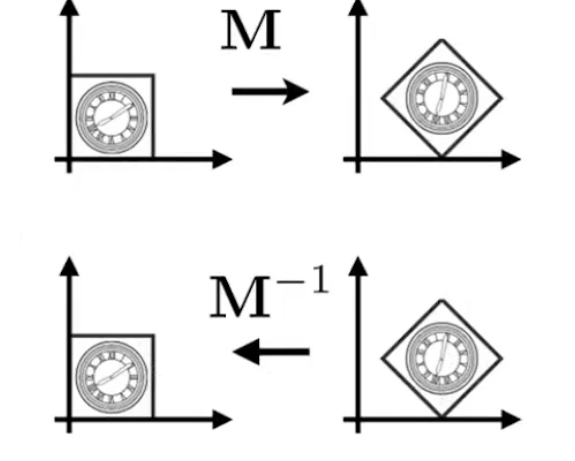
逆变换就是把之前的操作反向来一次,对应的就是矩阵中的逆矩阵
组合变换
图1
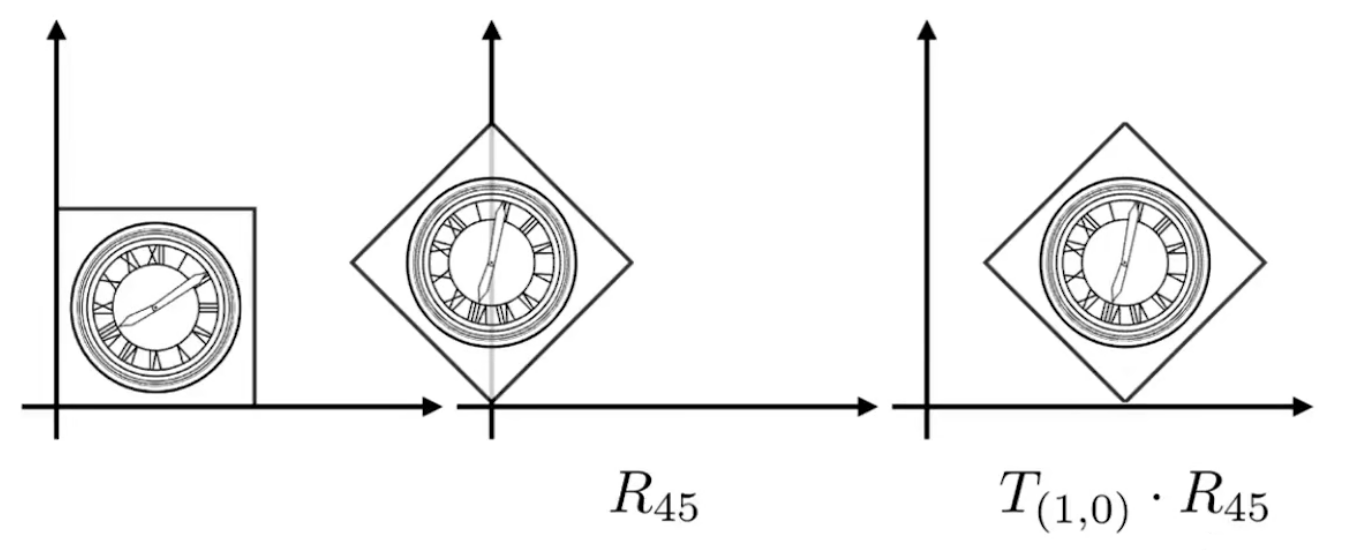
图2
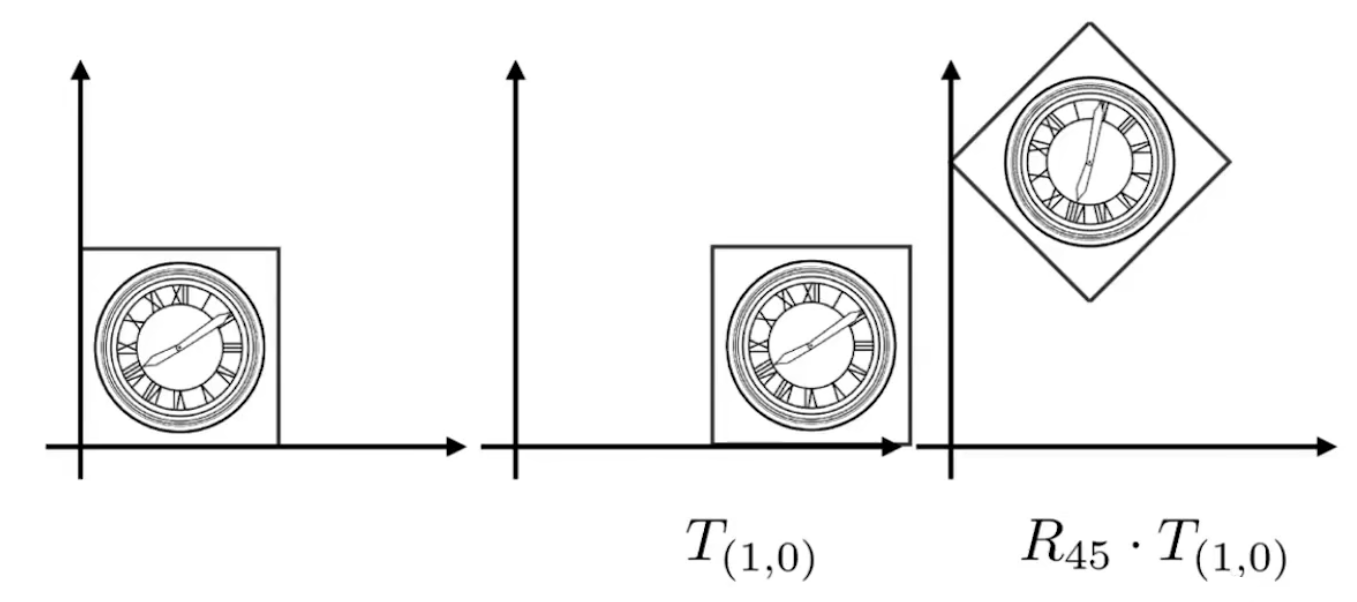
旋转默认绕原点,逆时针旋转
比较上述两张图片,可以发现先旋转再平移 与 先平移再旋转 得到的结果是不同的,对应的理解就是矩阵的乘法,矩阵乘法不满足交换律
为了得到图1的效果,我们需要先旋转45°,再向X轴正方向平移1一个单位
$$ T{(1, 0)} \cdot R{45} \cdot \begin{bmatrix}
x \\ y \\ 1
\end{bmatrix}= \begin{bmatrix}
1 & 0 & 1 \\
0 & 1 & 0 \\
0 & 0 & 1
\end{bmatrix} \begin{bmatrix}
\cos45° & -\sin45° & 0 \\
\sin45° & \cos45° & 0 \\
0 & 0 & 1
\end{bmatrix} \begin{bmatrix}
x \\ y \\ 1
\end{bmatrix} $$
前面提过向量一般放在矩阵乘法的最右边,并且根据矩阵具有结合律,上述式子可以理解为先计算$R{45}$与$\begin{bmatrix}x\y\1\end{bmatrix}$,再计算与$T{(1, 0)}$的乘法
但是,根据矩阵的结合律,我们可以先把前面的矩阵的计算结果得出最终变换矩阵,最后与向量相乘
$$ A_n(...A_2(A_1(X)) = \underbrace{A_n...A_2 \cdot A1}{先计算} \cdot \begin{pmatrix}
x \\ y \\ 1
\end{pmatrix} $$
变换的分解
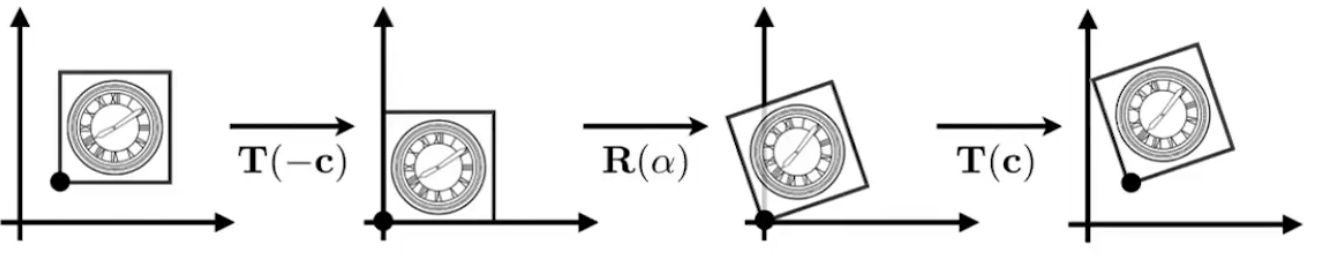
如果想让图片围绕左下角旋转,而不是原点选择,可以采用的解法是
左下角移动到原点 => 绕原点旋转 => 左下角移动到起始位置
三位空间的变换
三维与二维无非就是多了一个维度,其他的变换相似,原理相同
point : $\begin{pmatrix}
x & y & z & 1
\end{pmatrix}^T$
vector : $\begin{pmatrix}
x & y & z & 0
\end{pmatrix}^T$
$$ \begin{pmatrix}
x' \\ y^1 \\ z' \\ 1
\end{pmatrix}= \begin{pmatrix}
a & b & c & t_x \\
d & e & f & t_y \\
g & h & i & t_z \\
0 & 0 & 0 & 1
\end{pmatrix} \begin{pmatrix}
x \\ y \\ z \\ 1
\end{pmatrix} \ Scale \Longrightarrow S(s_x, s_y, s_z) = \begin{pmatrix}
s_x & 0 & 0 & 0 \\
0 & s_y & 0 & 0 \\
0 & 0 & s_z & 0 \\
0 & 0 & 0 & 1
\end{pmatrix} \ Translation \Longrightarrow T(t_x, t_y, t_z) = \begin{pmatrix}
1 & 0 & 0 & t_x \\
0 & 1 & 0 & t_y \\
0 & 0 & 1 & t_z \\
0 & 0 & 0 & 1
\end{pmatrix} \ R_x(\Theta)= \begin{pmatrix}
1 & 0 & 0 & 0 \\
0 & \cos\Theta & -\sin\Theta & 0 \\
0 & \sin\Theta & \cos\Theta & 0 \\
0 & 0 & 0 & 1
\end{pmatrix}绕X轴旋转 \ R_y(\Theta) = \begin{pmatrix}
\cos\Theta & 0 & \sin\Theta & 0 \\
0 & 1 & 0 & 0 \\
-\sin\Theta & 0 & \cos\Theta & 0 \\
0 & 0 & 0 & 1
\end{pmatrix}绕Y轴旋转 \ R_z(\Theta) = \begin{pmatrix}
\cos\Theta & -\sin\Theta & 0 & 0 \\
\sin\Theta & \cos\Theta & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1
\end{pmatrix}绕Z轴旋转 \ R_{xyz}(\alpha, \beta, \sigma) = R_x(\alpha)R_y(\beta)R_z(\sigma) $$
旋转时,绕哪个轴旋转,那个轴对应的坐标不变,所以x轴旋转的第一行第一列、y轴旋转的第二行第二列、z轴旋转的第三行第三列
如何证明$R_{xyz}(\alpha, \beta, \sigma) = R_x(\alpha)R_y(\beta)R_z(\sigma)$成立,这个时候需要引入罗德里格斯公式
视图变换 Camera/View
视图就类似使用设计相机拍照,视图就是镜头中的世界
- 拍一张好照片需要
- 好的地方(Module),搭建场景
- 好的角度(view),视图变换
- 投影(三维空间投影到二维照片)
综上,就是图形学渲染出效果的模型(Model)、视图(View)、投影(Projection)变换,简称MVP变换
- 定义相机
- 坐标
- 向上的向量(一个向量就可以确定相机的Roll)
- 朝向
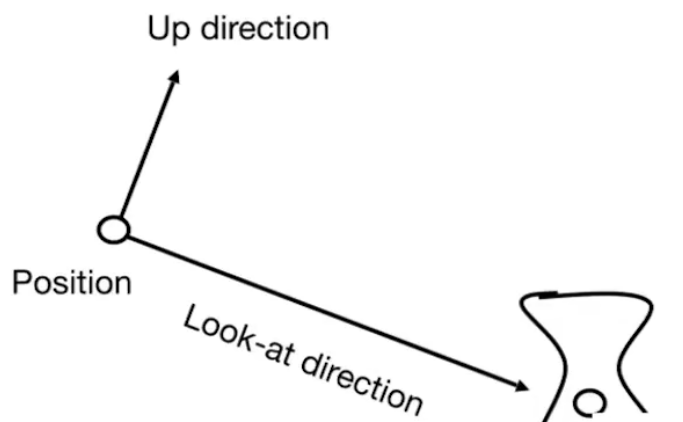
约定:相机永远在原点,永远不动,永远以y轴向上,永远看向-Z轴 其他物体也跟着相机移动
- 针对坐标为(x, y, z),角度为(a, b, c)的相机,需要做哪些变换
- 相机移动到原点坐标
- 相机的朝向旋转到-Z轴方向
- 相机的向上向量旋转到Y轴方向
设定相机的朝向向量为g,相机向上的向量为t,可推得相机另一个轴的向量为$g \times t$
$$ T_{view} = \begin{bmatrix}
1 & 0 & 0 & -x_e \\
0 & 1 & 0 & -y_e \\
0 & 0 & 0 & -z_e
\end{bmatrix} 坐标变换矩阵 \ R^{-1}_{view} = \begin{bmatrix}
x_{g \times t} & x_t & x_{-g} & 0 \\
y_{g \times t} & y_t & y_{-g} & 0 \\
z_{g \times t} & z_t & z_{-g} & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} 不加证明给出矩阵R{view}^{-1} \ R{view}^{-1} * \begin{bmatrix}
1 \\ 0 \\ 0
\end{bmatrix} = \begin{bmatrix}
x_{g \times t} \\
y_{g \times t} \\
z_{g \times t} \\
\end{bmatrix} 可见R{view}^{-1}乘以X轴、Y轴、Z轴都等于相机对应的向量坐标 \ R^{-1}{view} * 标准矩阵 = 相机矩阵 \Longrightarrow 相机矩阵 * R{view} = 标准矩阵 \ R{view}^{-1}是R{view}的逆矩阵 \ R{view} = \begin{bmatrix}
x_{g \times t} & y_{g \times t} &z_{g \times t} & 0 \\
x_t & y_t & z_t & 0 \\
x_{-g} & y_{-g} & z_{-g} & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} 不加证明给出矩阵R{view} \ M{view} = R{view} T{view} 组合后得出视图变换矩阵(从右往左的理解顺序,先平移、再旋转) $$
相机和所有的物体都根据该模型移动到特定位置,此时相机肯定是在原点的、看向-Z轴,向上坐标为Y轴的,各个物体的相对位置不变
模型(单独对模型的操作)-视图(对相机的操作并同步到模型上)变换
投影变换
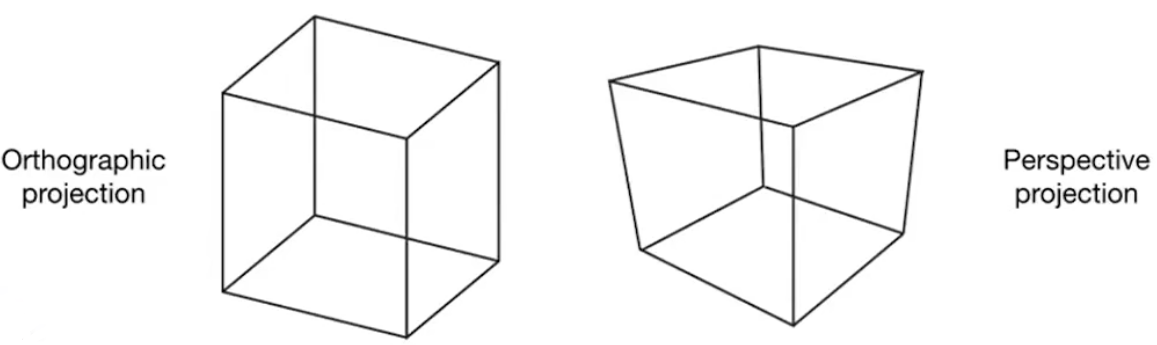
图中左边为正交投影,右边是透视投影
- 正交投影不会带来近大远小的世界效果,一般用于工程制图
- 透视投影会有近大远小
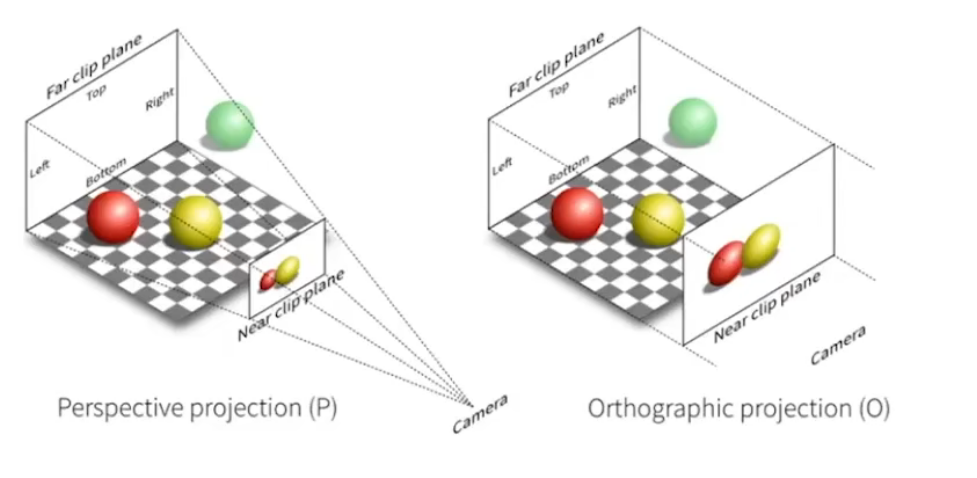
图中左边为透视投影,右边为正交投影
对于正交投影出来的图片结果,可以理解为相机在一个无限远的地方拍照,这样物体之间的距离差距就可以忽略不计了(走路月亮跟着你走的也是这个原因)
正交投影 Orthographic
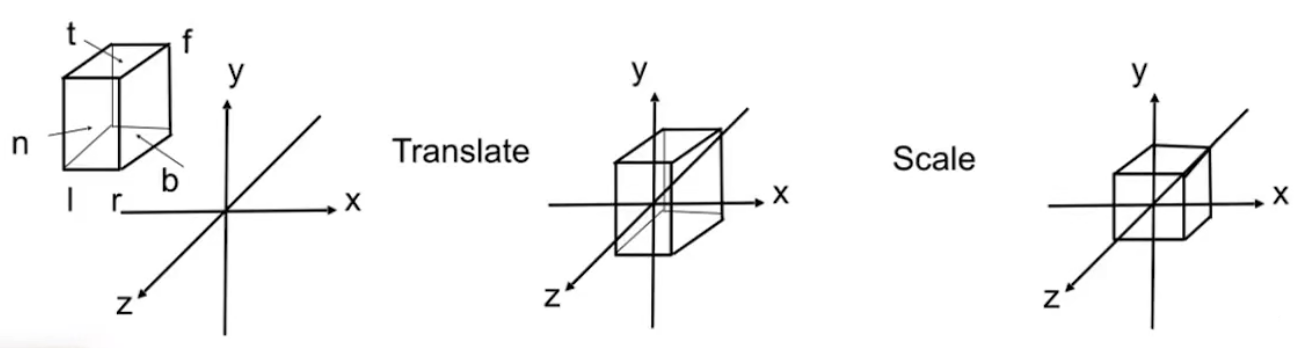
- 在正交投影中定义一个矩阵,需要定义
- l(left)、r(right),左平面距离矩形中心的距离和右平面距离矩形中心的距离
- t(top)、b(bottom),上平面距离矩形中心的距离和下平面距离矩形中心的距离
- f(far)、r(near),远平面距离矩形中心的距离和近平面距离矩形中心的距离
因为相机朝向是-Z轴,所以f值一般小于r值
在定义完一个矩形之后,需要将其通过一系列变换转换成图片中最右边的标准立方体(canonical cub $[-1 ,1]^3$)
- 一系列变换指的是
- 矩形移动到原点
- X、Y、Z轴拉伸成[-1, 1]
$$ M_{ortho} = \begin{bmatrix}
\frac{2}{r-l} & 0 & 0 & 0 \\
0 & \frac{2}{t-b} & 0 & 0 \\
0 & 0 & \frac{2}{n-f} & 0 \\
0 & 0 & 0 & 1
\end{bmatrix} \begin{bmatrix}
1 & 0 & 0 & -\frac{r+l}{2} \\
0 & 1 & 0 & -\frac{t+b}{2} \\
0 & 0 & 1 & -\frac{n+f}{2} \\
0 & 0 & 0 & 1
\end{bmatrix} $$
左边缩放矩阵、右边平移矩阵(操作顺序从右往左理解)
暂不考虑旋转
这里对物体做了拉伸,未来还会做一次视口变换,视口变换时会再做一次拉伸
透视投影 Perspective
理论上两条平行的先看起来相交了

前置知识:点(x, y, z, 1)乘以k,得到(kx, ky, kz, k != 0)表示其实也是点(x, y, z, 1),将k换成z,可以得到(xz, yz, $z^2$,z != 0),也表示(x, y, z, 1)这个点
(1, 0, 0, 1)与(2, 0, 0, 2)表示同一个点

透视投影分两步
- 将Frustum平截头体转换成Cuboid矩形
- 进行一次正交投影
将Frustum平截头体转换成Cuboid矩形
- n(near)平面的四个点不会发生变换
- f(far)平面的z值不会发生变换,只是在平面内进行收缩
- n、f平面的中心点不会发生变化
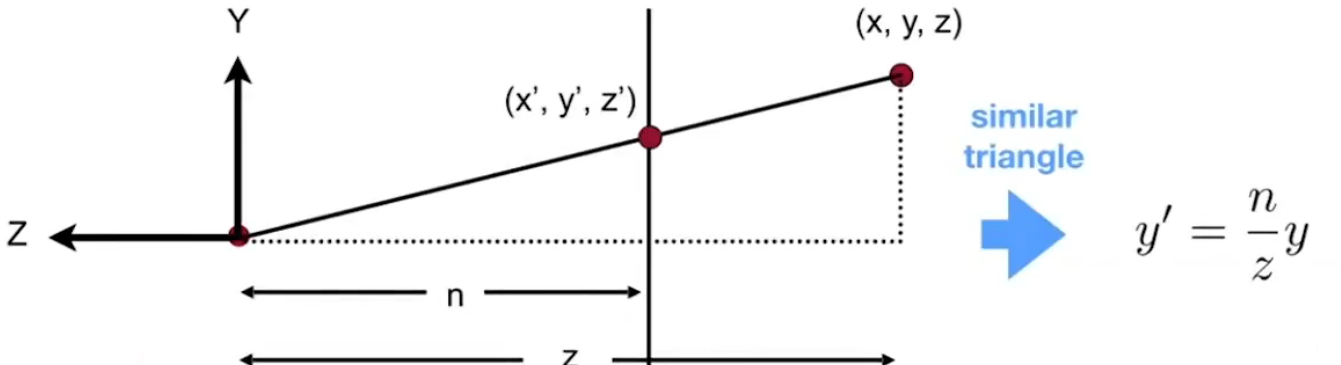
通过侧面观察,更容易得到结论
最左边的红点就是摄像机的位置,中间的红点就是n(near)平面,最右边的红点就是f(far)平面
目标就是将(x, y, z) => (x, y\', z),通过相似三角形可以推出计算公式
设$M_{persp}$为透视变换矩阵
设$M^{(4\times4)}_{persp \rightarrow ortho}$为透视变换成正交的变换矩阵
得出$M{persp}=M{ortho}M^{(4\times4)}_{persp \rightarrow ortho}$,即将模型先变换成正交可以用的矩形,再通过正交变换矩阵计算
$x=\frac{n}{z}x,y=\frac{n}{z}y$
$$ \begin{pmatrix}
x \\ y \\ z \\ 1
\end{pmatrix} \Rightarrow \begin{pmatrix}
nx/x \\ ny/z \\ unknow \\ 1
\end{pmatrix} == \begin{pmatrix}
nx \\ ny \\ still unknow \\ z
\end{pmatrix} \ M^{(4\times4)}_{persp \rightarrow ortho} \begin{pmatrix}
x \\ y \\ z \\ 1
\end{pmatrix} = \begin{pmatrix}
nx \\ ny \\ unknow \\ z
\end{pmatrix} \Rightarrow M^{(4\times4)}_{persp \rightarrow ortho} = \begin{pmatrix}
n & 0 & 0 & 0 \\
0 & n & 0 & 0 \\
? & ? & ? & ? \\
0 & 0 & 1 & 0
\end{pmatrix} $$
透视变换矩阵最后一行完全可以是(0 0 0 z),但是z是变量,到时候计算的时候还得实时带入z的真实值,对于计算机来说很麻烦,要开辟内存,还要传值,浪费资源
- 此时带入观察到的两个细节
- 对近平面来说,(x, y, n, 1) (n表示近平面的z)与透视变换矩阵运算,其x、y、n值不变
- 对远平面来说,(x, y, f, 1) (f表示远平名的z)与透视变换矩阵运算,其f值不变
- 对远平面来说,(0, 0, f, 1) 与透视变换矩阵运算,其值不变,仍未(0, 0, f, 1)
$$ M^{(4\times4)}_{persp \rightarrow ortho} \begin{pmatrix}
x \\ y \\ n \\ 1
\end{pmatrix} = \begin{pmatrix}
x \\ y \\ n \\ 1
\end{pmatrix} == \begin{pmatrix}
nx \\ ny \\ n^2 \\ n
\end{pmatrix} \ 设M^{(4\times4)}_{persp \rightarrow ortho}第三行为 \begin{pmatrix}
A & B & C & D
\end{pmatrix} 带入上述式子的计算中得 \begin{pmatrix}
A & B & C & D
\end{pmatrix} \begin{pmatrix}
x \\ y \\ n \\ 1
\end{pmatrix} = n^2 \ 得到A=0, B=0, C*n + B = n^2 \ M^{(4\times4)}_{persp \rightarrow ortho} \begin{pmatrix}
0 \\ 0 \\ f \\ 1
\end{pmatrix} = \begin{pmatrix}
0 \\ 0 \\ f \\ 1
\end{pmatrix} == \begin{pmatrix}
0 \\ 0 \\ f^2 \\ f
\end{pmatrix} \ 带入前面推理(0, 0, C, D)式子中,得到 Cf + D = f^2 \ \begin{matrix}
Cn + D = n^2 \\
Cf + D = f^2
\end{matrix} \Longrightarrow \begin{matrix}
C = n + f \\
D = -nf
\end{matrix} \ M^{(4\times4)}_{persp \rightarrow ortho} = \begin{pmatrix}
n & 0 & 0 & 0 \\
0 & n & 0 & 0 \\
0 & 0 & n + f & -nf \\
0 & 0 & 1 & 0
\end{pmatrix} $$
将得到的矩阵与(x,y,z,1)相乘后z的值等于(-nf)*z^(-1)+(n+f),是个反比例函数,这个图像恒过(n,n)与(f,f),在n与f之间,z是下凹的,所以z变小了,即再f与n平面之间的点的z是会变小的
光栅化(Rasterization)
将三维空间的几何形体显示到屏幕上
将投影的基本体分解为片段(像素)
通过前面的视图变换、投影变换(正交、透视),我们得到了[-1, 1]^3的标准立方体
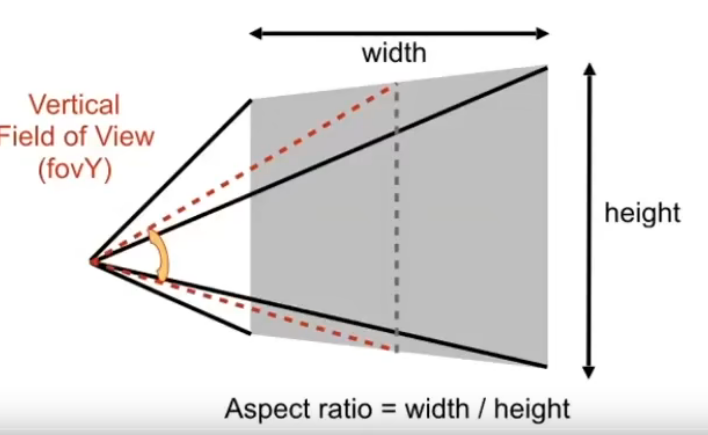
- 定义视锥需要的两个数据
- 宽高比
- 垂直的可视角度
- 屏幕:图形学中认为屏幕是一个数组,数组中每一个元素是一个像素
- 光栅:Raster,就表示屏幕,光栅化(Rasterize)可以理解为把东西绘制在屏幕上
- 像素:Pixel(Picture Element的缩写)
屏幕空间:在屏幕上定义的坐标系,屏幕左下角为(0, 0)原点,向上为Y轴正方向,向右为X轴正方向
- 坐标从0开始,而不是从1开始
- 屏幕的所有的像素是从(0, 0)到(width - 1, height - 1)
- (x, y)点像素的中心在(x + 0.5, y + 0.5)上
- 屏幕表示的范围从(0, 0)到(width, height)
在不考虑Z轴的情况下,将[-1, 1]的矩阵的x、y坐标映射到屏幕中
- 移动到屏幕中心
- 缩放一下 $$ M_{viewport} = \begin{pmatrix} \frac{width}{2} & 0 & 0 & \frac{width}{2} \ 0 & \frac{height}{2} & 0 & \frac{height}{2} \ 0 & 0 & 1 & 0 \ 0 & 0 & 0 & 1 \end{pmatrix} $$
图形学广泛使用三角形
- 三角形是最基础的多边形
- 任何多边形都可以被拆分成多个三角形
- 三角形三个点肯定在同一个平面
- 三角形内外定义清晰(多边形可能有洞 圆环,可能不是凸包)
- 三角形三个点定义不同属性,三角形内部的各个点可以逐渐渐变
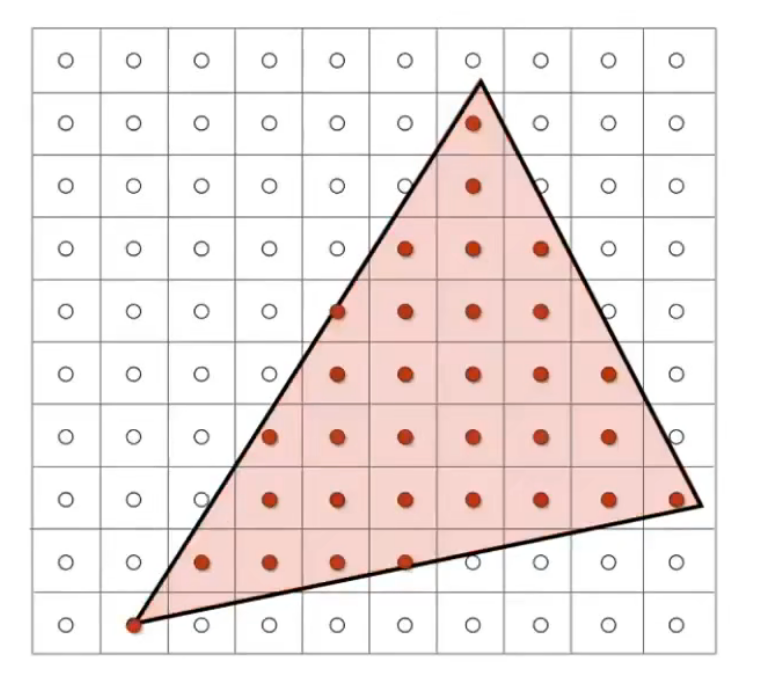
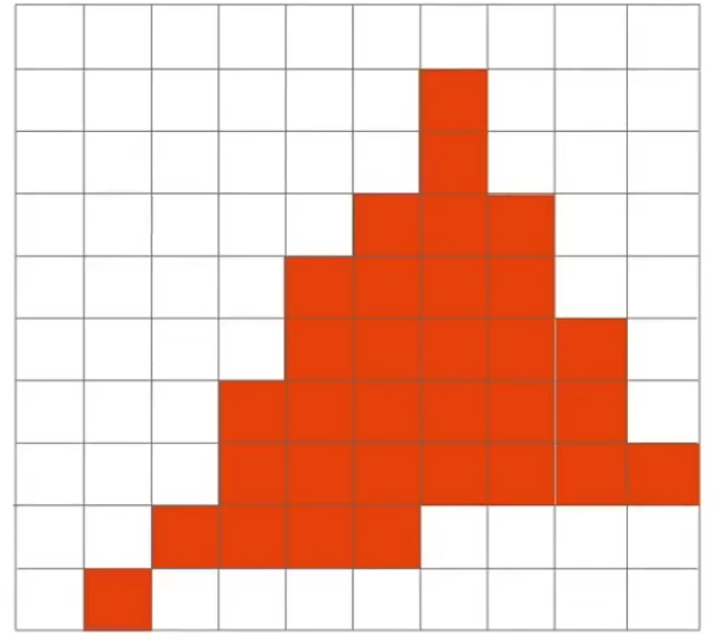
利用像素中心,对屏幕空间进行采样
$$ inside(tri, x, y) = \begin{cases}
1, Point(x, y) 在 tri 这个形状中 \\
0, Point(x, y) 不在 tri 形状中
\end{cases} $$
for(int x = 0; x < width; ++x){
for(int y = 0; y < height; ++y){
image[x][y] = inside(tri, x+0.5, y+0.5)
}
}
通过上述代码就可以知道(x, y)像素是否在多边形中,因为像素中心坐标是(x+0.5, y+0.5),所以传入的是像素中心坐标
那么如何判断像素点是否在三角形内呢? 最开始将的叉乘就可以用到了
判断像素是否在三角形中不用判断(0, 0)到(width, height)中所有的像素,只需要判断三角形三个点中最高、最低、最左、最右所围城的矩阵即可,这个矩阵被称为包围盒
走样与反走样
锯齿、走样、Aliasing
Artifacts表示一切在计算机图形学中的错误(Error)、瑕疵(Mistakes)
锯齿属于一种Artifact,摩尔纹也是一种Artifact,车轮效应也是Artifact
车轮效应就是车轮是顺时针旋转的,但是你看车轮确实逆时针旋转,就是人眼的采样跟不上车轮的旋转导致的
在采样之前做模糊、滤波处理
傅里叶级数展开:任何周期性函数都写成一系列正弦和余弦以及一个常数项的总和
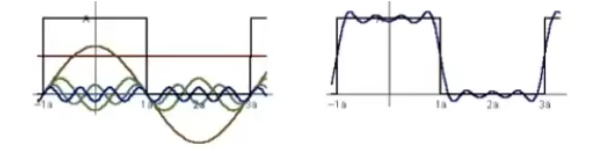
$$ f(x) = \frac{A}{2} + \frac{2A\cos(tw)}{\pi} - \frac{2A\cos(3tw)}{3\pi} + \frac{2A\cos(5tw)}{5\pi} - \frac{2A\cos(7tw)}{7\pi} + ... $$
如上图所示,将很多个不同频率的正弦余弦叠加在一起,拼出一个与目标近似的周期函数,此时运用极限的思想,可以推理出无限个正弦余弦叠加就能拼出目标函数
傅里叶变换:给定任意函数可以通过一系列变换变成另一个函数,还可以把变换后的函数通过逆变换再变回去
- 傅里叶变换: $F(w) = \int_{-\infty}^{\infty}f(x)e^{-2\pi iwx}dx$
- 逆傅里叶变换:$f(x) = \int_{-\infty}^{\infty}F(w)e^{2\pi iwx}dw$
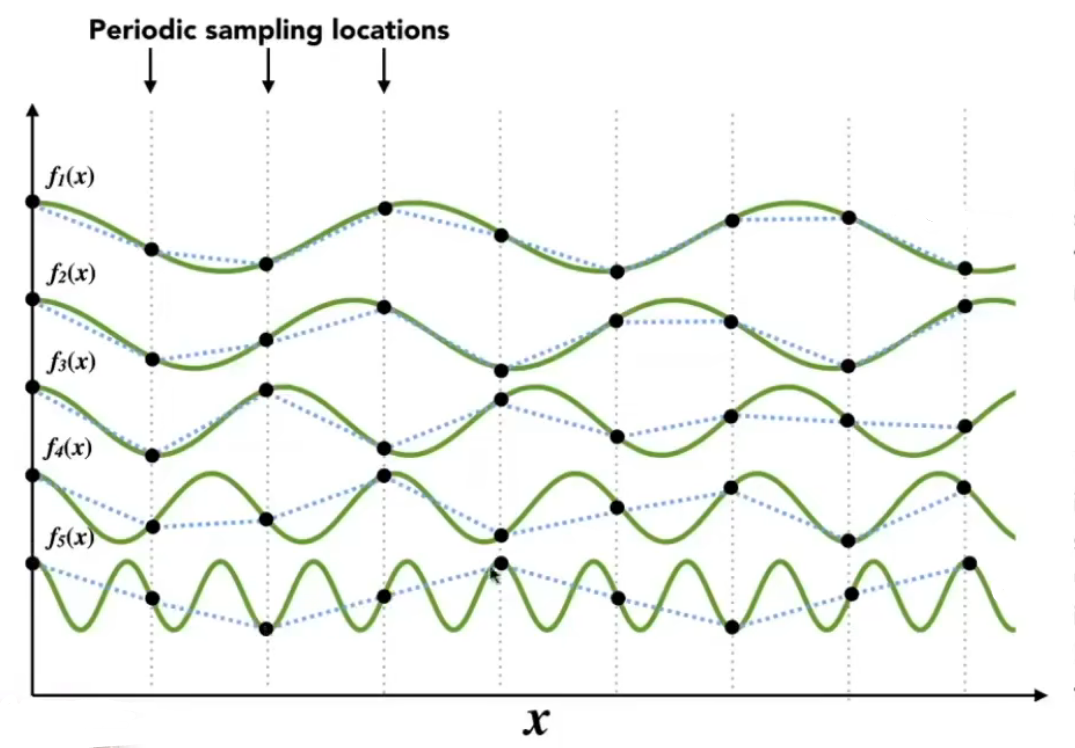
这里给出不同的五种函数从$f_1(x) \Rightarrow f_5(x)$,从上到下频率逐渐增加,我们发现按照虚线对函数进行采样,采样得到的点(途中黑色的点)连起来逐渐不能恢复曲线原来的磨样(黑点之间的链接虚线与原曲线的差距越来越大)
通过上图我们可以发现,当采样的频率跟不上曲线变换的频率的时候,就无法还原出原始信号
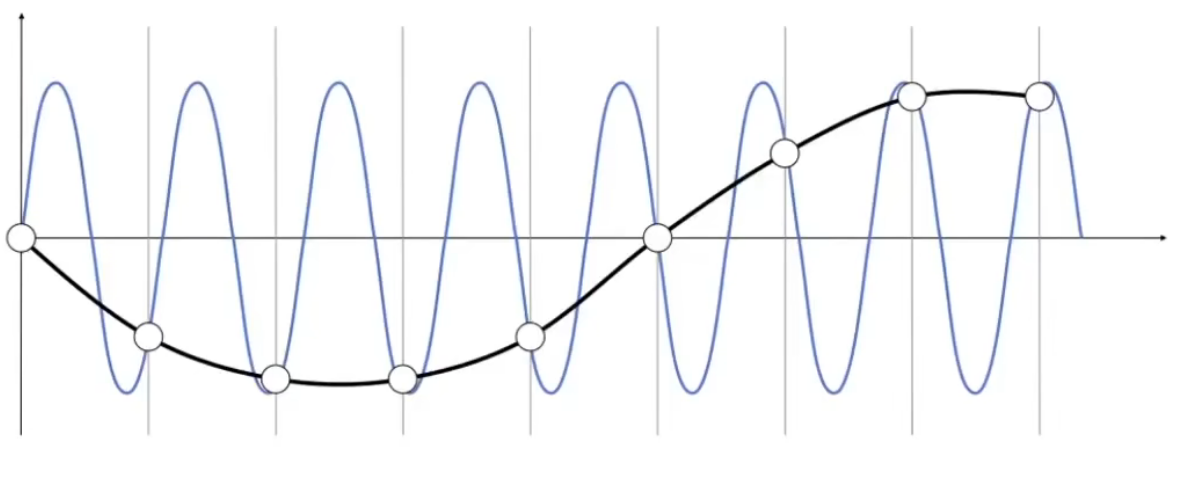
竖线为采样线,白点为采集到的点,蓝色和黑色线表示两种函数
同样的采样方法,采样两种不同的频率的函数,我们无法区分,我们称之为走样
滤波:删除某些特定频率。那么对应的信号应该如何变换
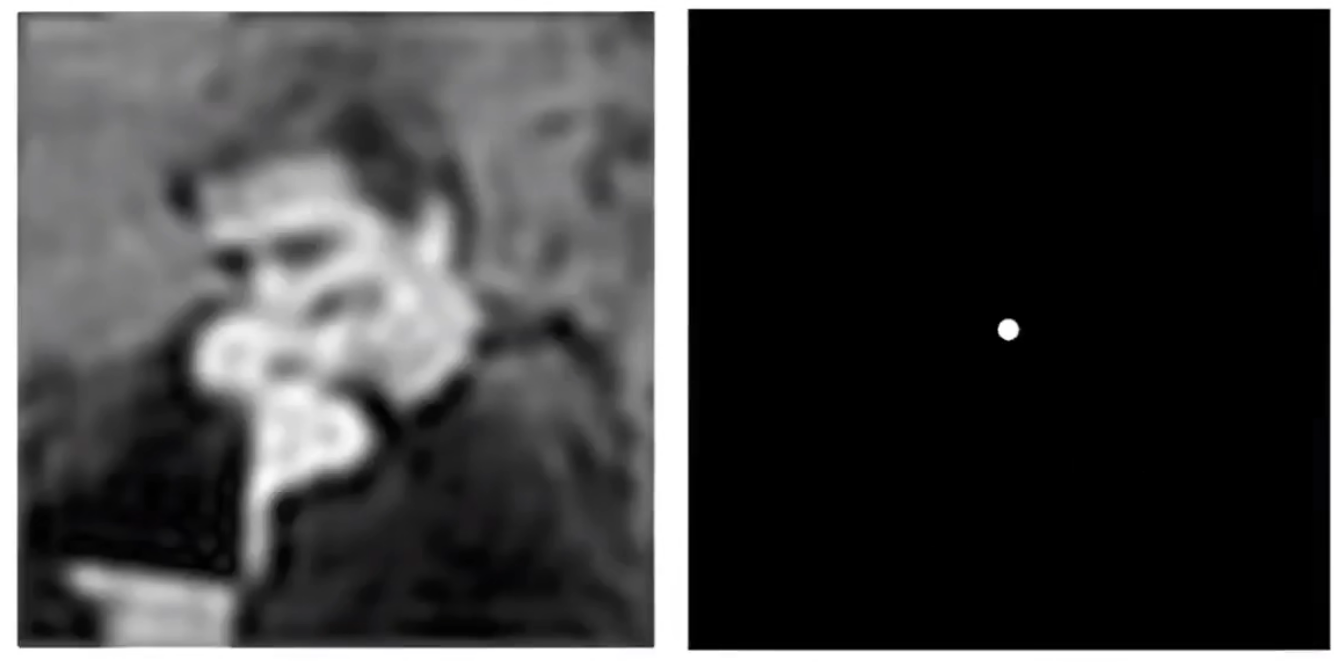
傅里叶变换可以把图片从时域信号变为频域信号

图左为时域信号,图右为频域信号
频域空间图:中心定义为最低频的区域,周围定义成高频区域,不同的频域的地方有多少信息通过亮度来表示
根据上述图片来理解就是:亮点主要集中在中心,说明原图片低频信息多,高频信息少(不是没有)
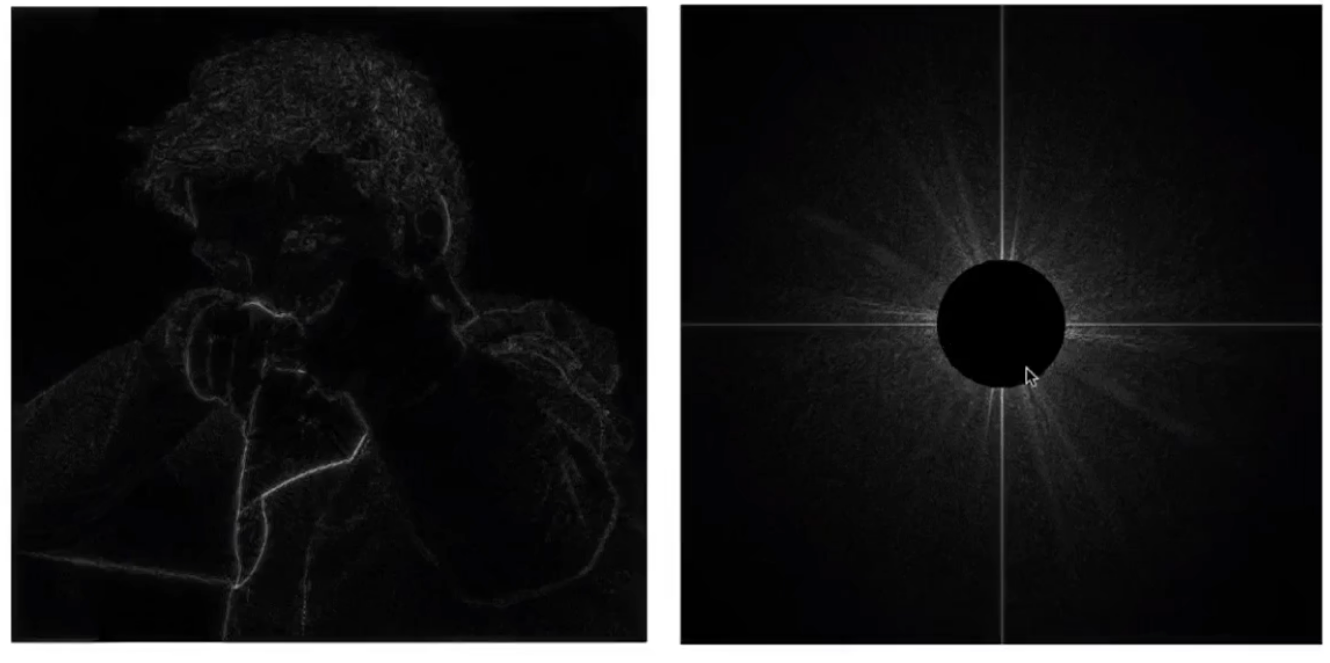
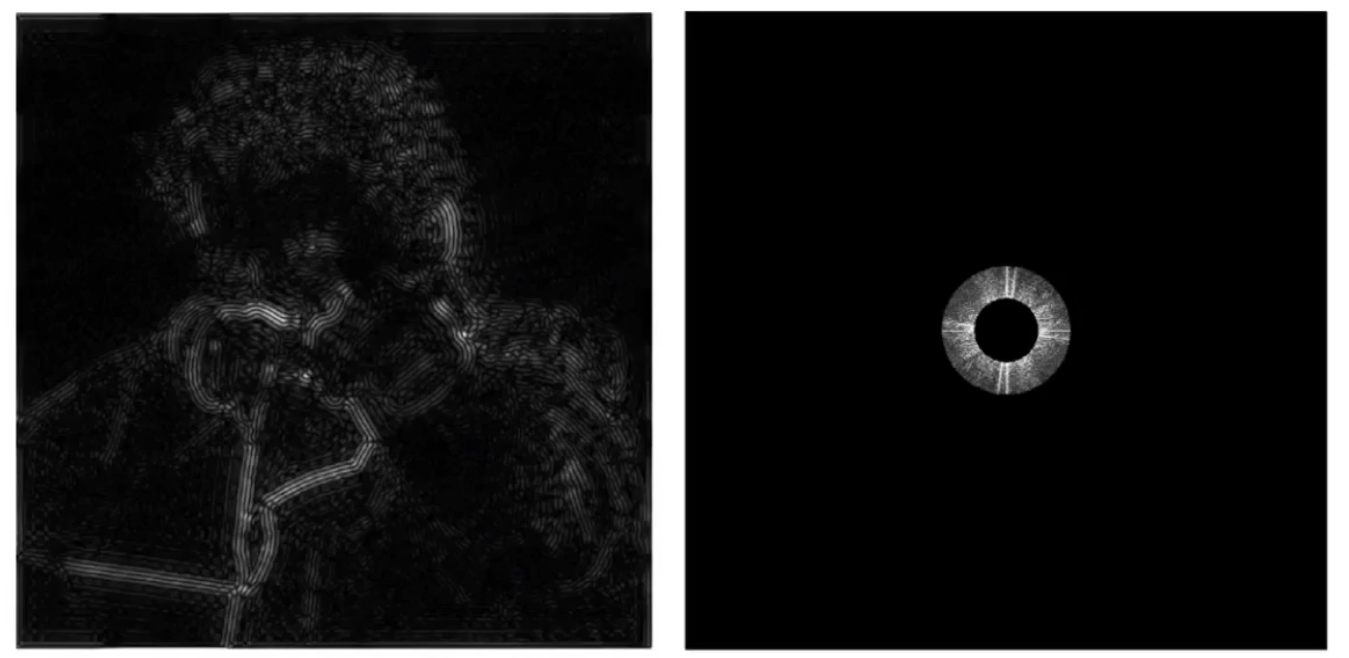
同一张图,如果将频域空间中间的低频信号删除(白色改成黑色),再逆傅里叶变换回去,可以发现图像的边界特别明显
上述操作就是 高通滤波(把低频的删除,只留下高频)
边界,可以理解成上下或左右差距很大的地方。那么差距大就可以理解为变化频率高,即高频信息,那么通过高频滤波,自然而然就只剩下差距大的地方的了
同一张图,如果将频域空间的所有高频信息都删除(除中心点附近特定半径内,都设为黑色),再傅里叶变换回去,可以得到一张很模糊的图片
上述操作就是低通滤波(低频率通过 高频率去掉)
特定内容在,数字图像处理中学习
滤波
滤波 = 去掉特定频率的信息 = 平均 = 卷积
Filtering = Convolution = Averaging
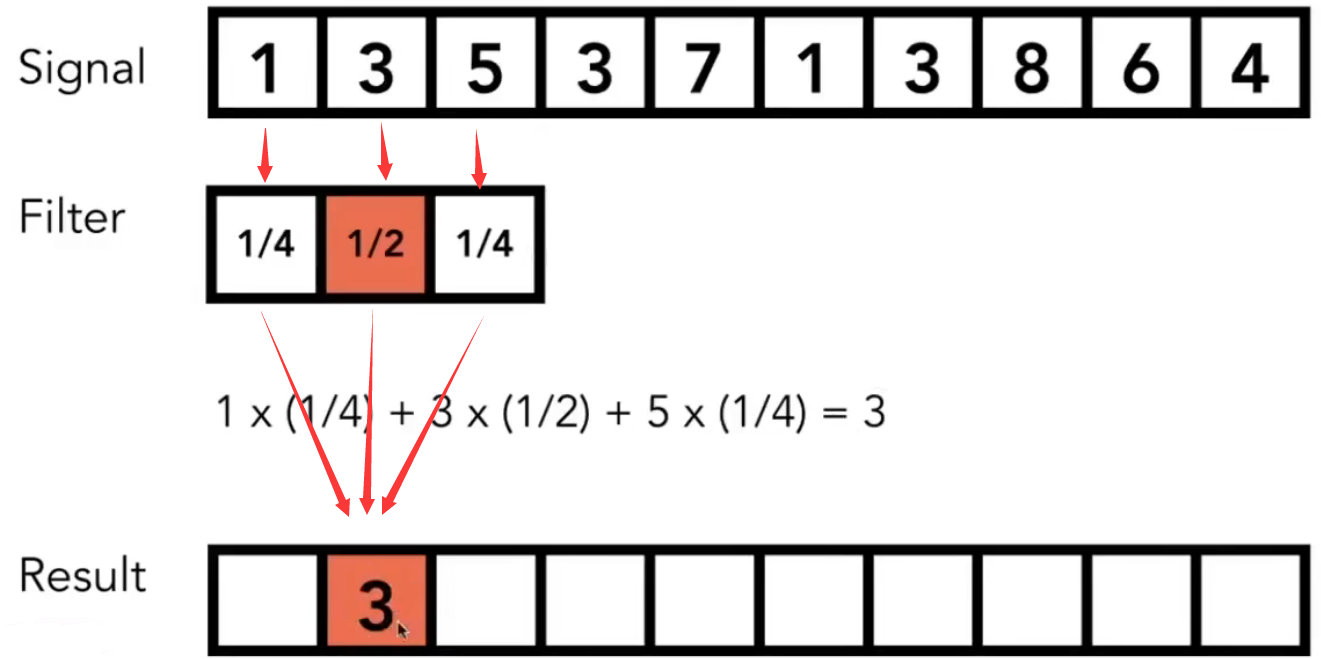
简单卷积的理解
Filter:滤波器、Siganl:信号
在移动Filter窗口的过程中,将Signal的三个数和Filter的三个数做一个点乘,再将计算结果写回窗口的中心值(说白了就是一种加权平均)
也就是说,卷积作用在一个信号上,用某种滤波器对信号进行卷积操作,并且得到一个结果
并不是真实数学上的定义,仅仅是图形学上的简化定义
- 卷积的定理
- 时域上如果对两个信号进行卷积,对应两个信号各自的频域上,两个信号频域的乘积
- 时域上如果是乘积,那么频域上就是卷积
可以拿到一个图,用某种滤波器去做卷积操作
也可以得到图片的傅里叶变换的频域,再把卷积的滤波器变换到频域上,再把两者相乘,得到的频域的结果,最后将结果逆傅里叶变化到时域上
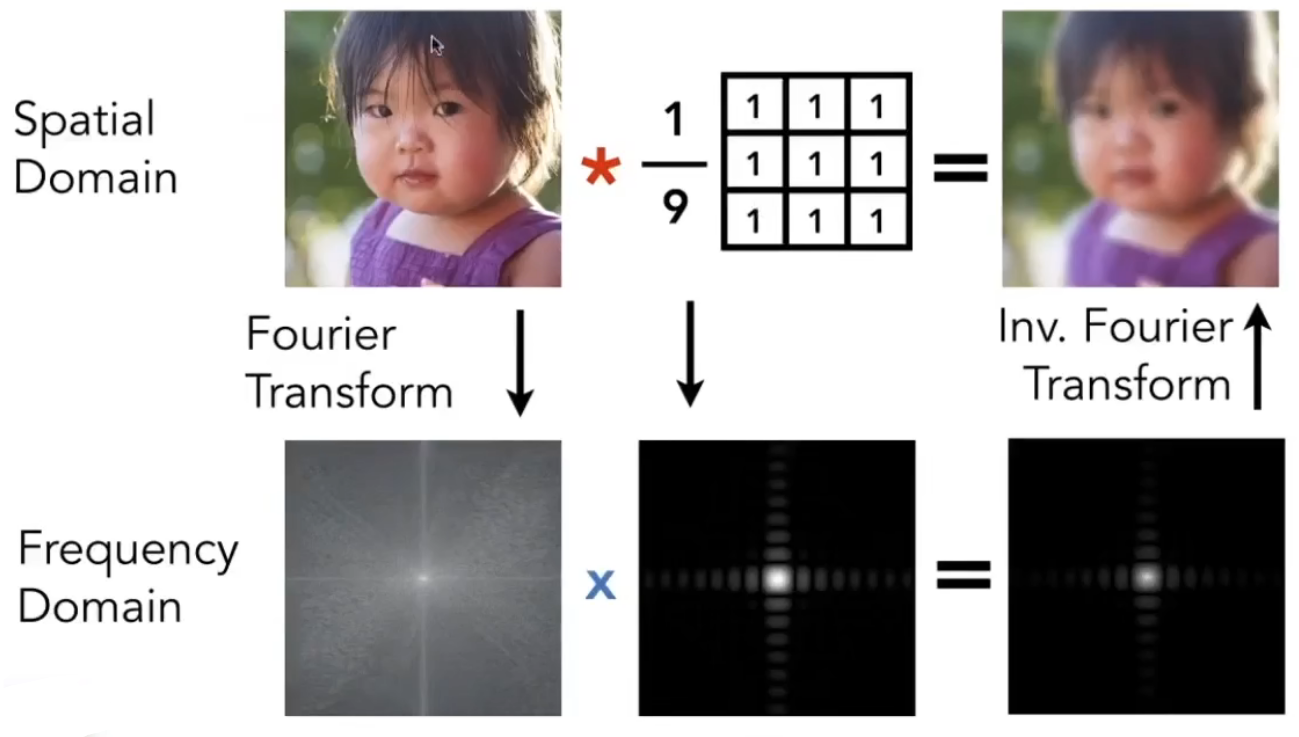
均值滤波
- 上面图片可以分上下两块理解
- 对图片的每个像素都等于自己和周围8个像素的平均值(对时域图做卷积操作)
- 对傅里叶变化的频域与滤波器的频域相乘(对频域图的乘法操作)
可以发现上述两种操作,得到的结果是相同的
采样
Sampling = Repeating Frequency Contents
采样就是重复频域上的内容
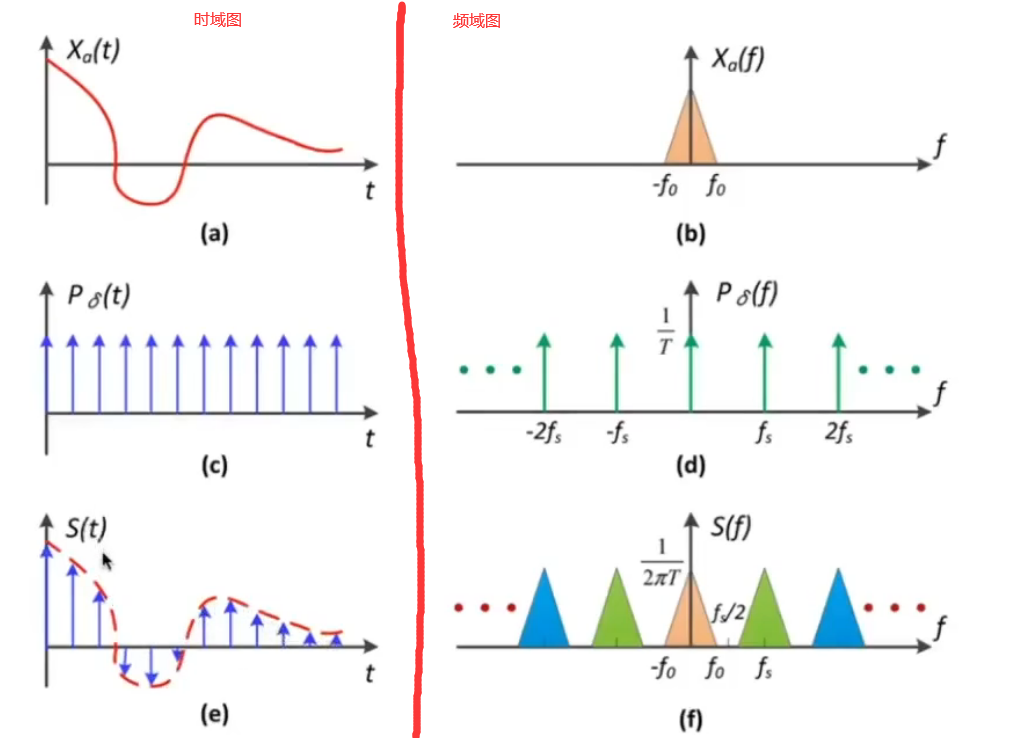
- 图(a) : $X_a(t)$为原函数图像
- 图(c) : $P_\delta(t)$为冲击函数
- 图(e) : $S(t)$为原函数与冲击函数乘积的结果,就是$X_a(t)$函数上离散的点
- 图(b) : $X_a(t)$函数傅里叶变换之后的函数
- 图(d) : $P_\delta(t)$冲击函数傅里叶变换之后的新的冲击函数
- 图(f) : 图(b)与图(d)的卷积的结果
图(c)的冲击函数,就是只有在竖线上才有值,也就是说图(a)与图(c)的乘积就是在图(a)上周期行的取一些点,就跟之前的取样一样的
采样:在频率上的理解就是重复一个原始信号的平铺
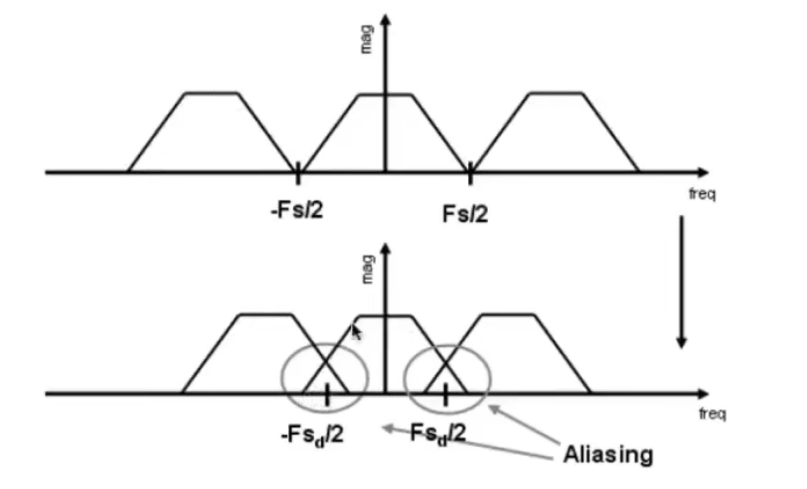
上图中,上面是合理的采样周期,原始信号的平铺是井然有序、严丝合缝的;当采样率不足或采样不够快,就会导致原始信号的间距越小
那么,我们可以称在频域中,频域的平铺在搬移的情况下发生了混合(混叠),就是产生走样的原因
时域中采样越稀疏,在会让频域中的原始数据越密集
反走样
增加采样率(减少频域上平铺的混合),增加屏幕分别率
对于同一台设备,不具有实用性,并不能要求使用者更换显示器
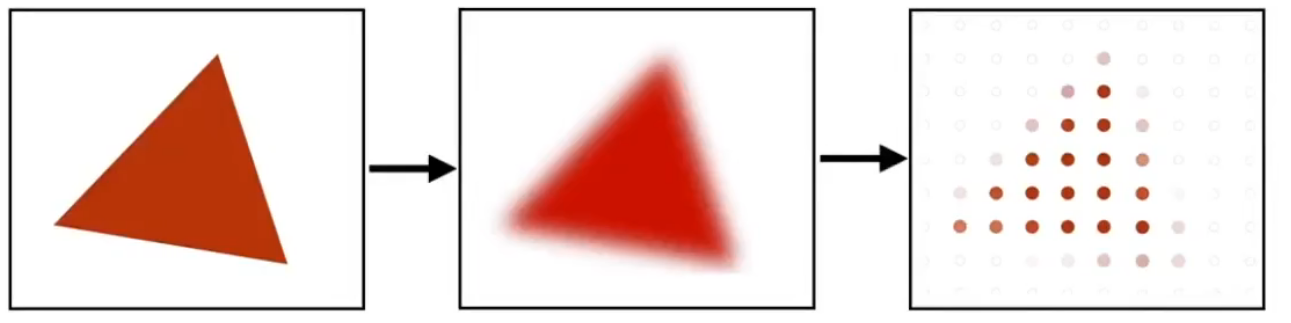
先做模糊,再做采样
通过低通滤波,去掉高频信息,再采样
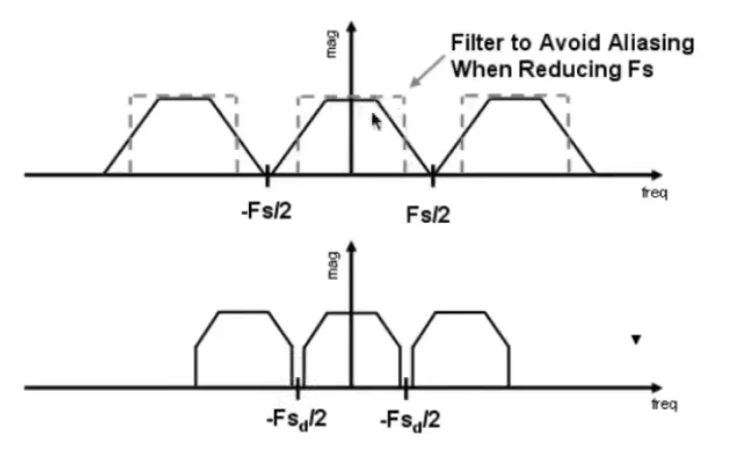
通过去掉高频信号,让原本混叠的部分,不再混叠,从而减少了走样
如何模糊:使用一定大小的低通滤波器对每个像素的覆盖面积做一个卷积
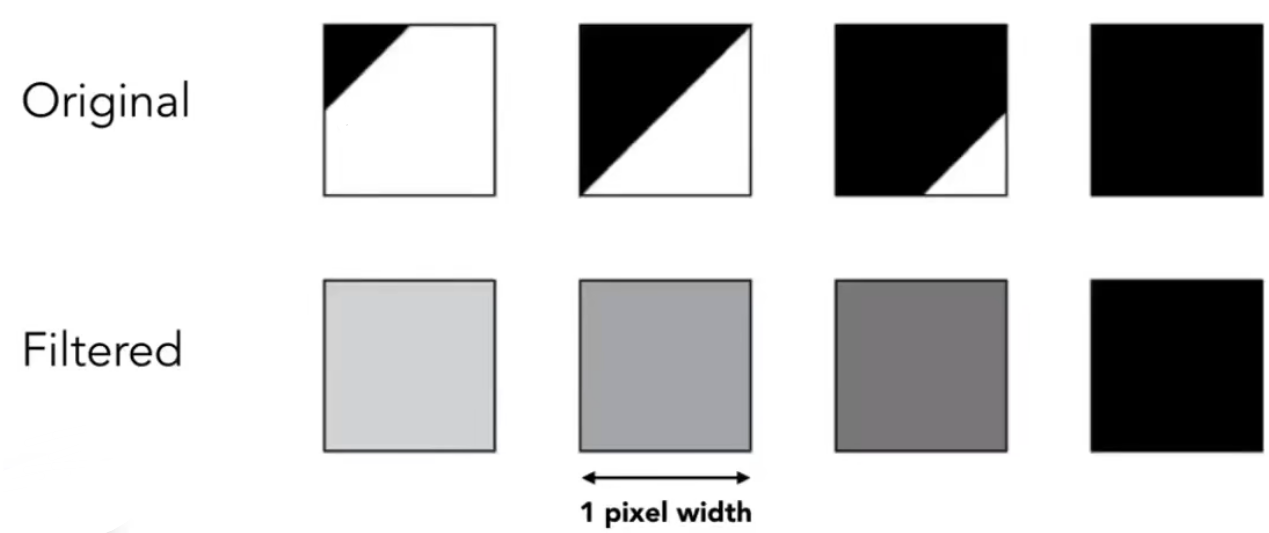
Original是每个像素可能出现的情况,被覆盖小部分、被覆盖一半、被覆盖大部分、被完全覆盖
Fileterd是每个像素通过低通滤波器卷积后的结果
那么如何计算三角形在每个像素中占的比例多少呢? 不容易、计算量大
Antialiasing By Supersampling(MSAA)多重采样抗锯齿
这是近似算法,严格意义上不能解决走样问题
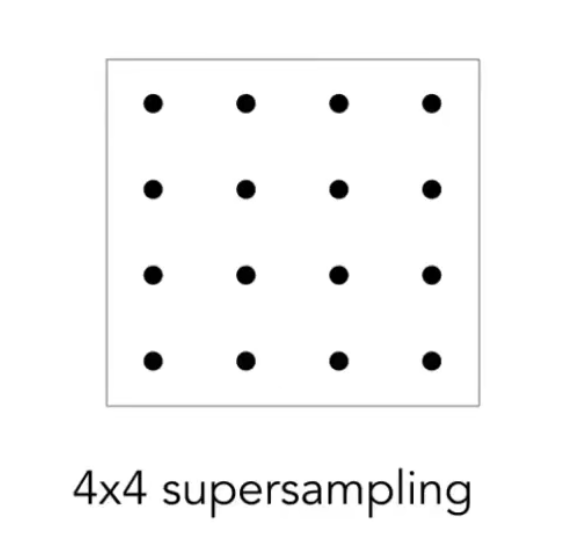
将一个像素,分成若干个小的像素(图中是将一个像素分成4*4,黑色的点表示各个小像素的中心点),然后再判断各个小像素的中心点是否在三角形中,再把判断结果平均一下,就能得到当前像素百分之多少在三角形中的近似值
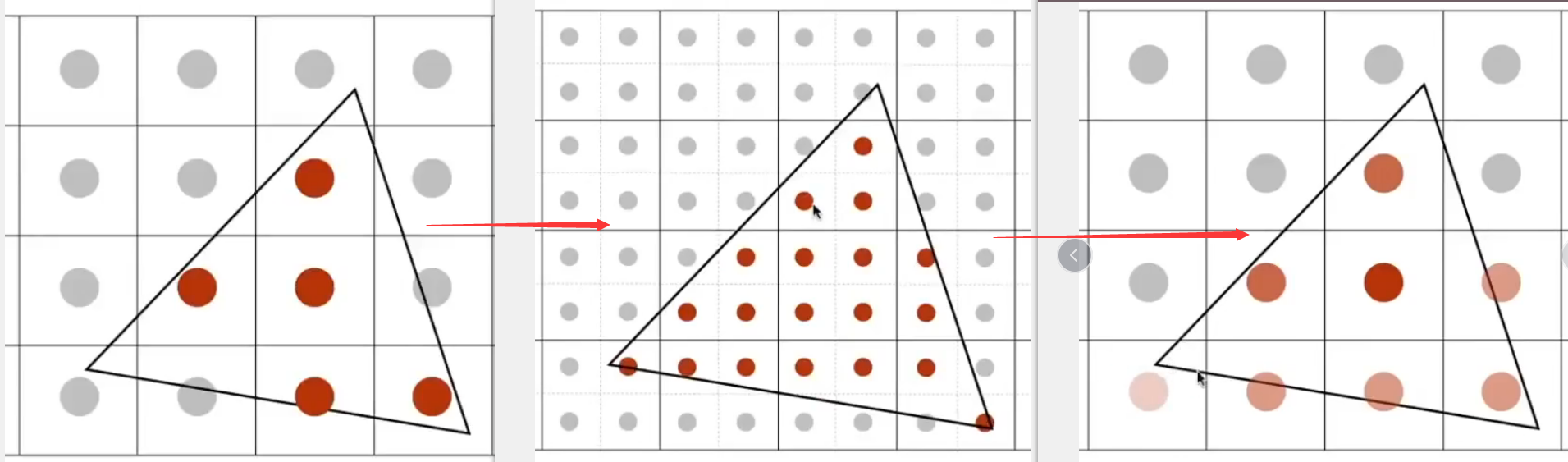
MSAA解决的对信号的模糊操作,只不过MSAA最后的出来的值也可以用作采样
- 为了使用MSAA: 增加了计算量(每个像素内又多算了很多次):工业上会通过更加有效的图案来分布不同的点,而不是这里的均匀分布;也有计算结果复用
FXAA(Fast Approximate AA)
快速近似抗锯齿
TAA(Temporal AA)
通过上一帧的信息,感知到的信息,来推测
Super Resolution / super sampling
超分辨率/超采样
将512*512的图片拉伸成1024*1024的图片时,会出现非常明显的锯齿
解决方法就是DLSS(Deep Learning Super Sampling),就是通过深度学习去猜测缺失部分的信息内容,并且补足
深度缓冲
很多三角形叠在一起的时候,怎么处理?
要让离摄像机近的物体遮挡远处物体,通过深度缓冲,也叫Z-Buffer
- 画家算法
先画远处的面,再画近处的面,一层一层的覆盖
需要先对所有的三角形面片进行排序,时间复杂度 $O(n\log _2n)$
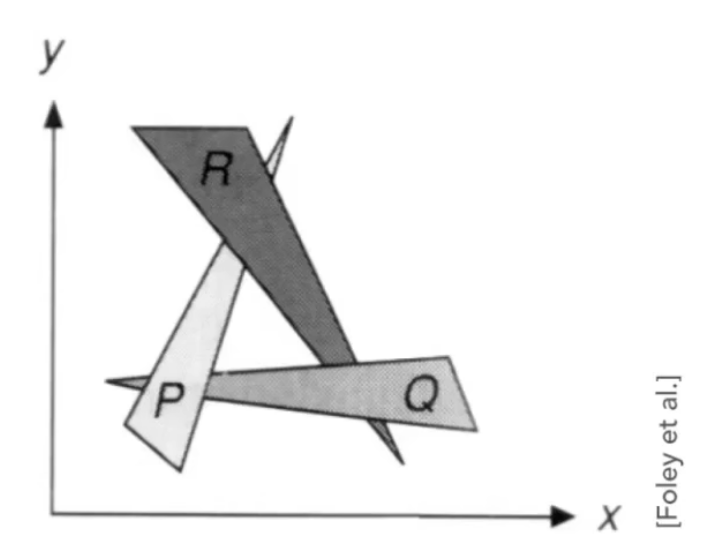
画家算法无法解决这种互相遮挡的关系
- Z-Buffer
对单独的三角形面片无法排序,那么直接对单个像素进行处理,保证单个像素所存的是其看到的几何物体的最浅的深度信息,即深度图,深度缓存
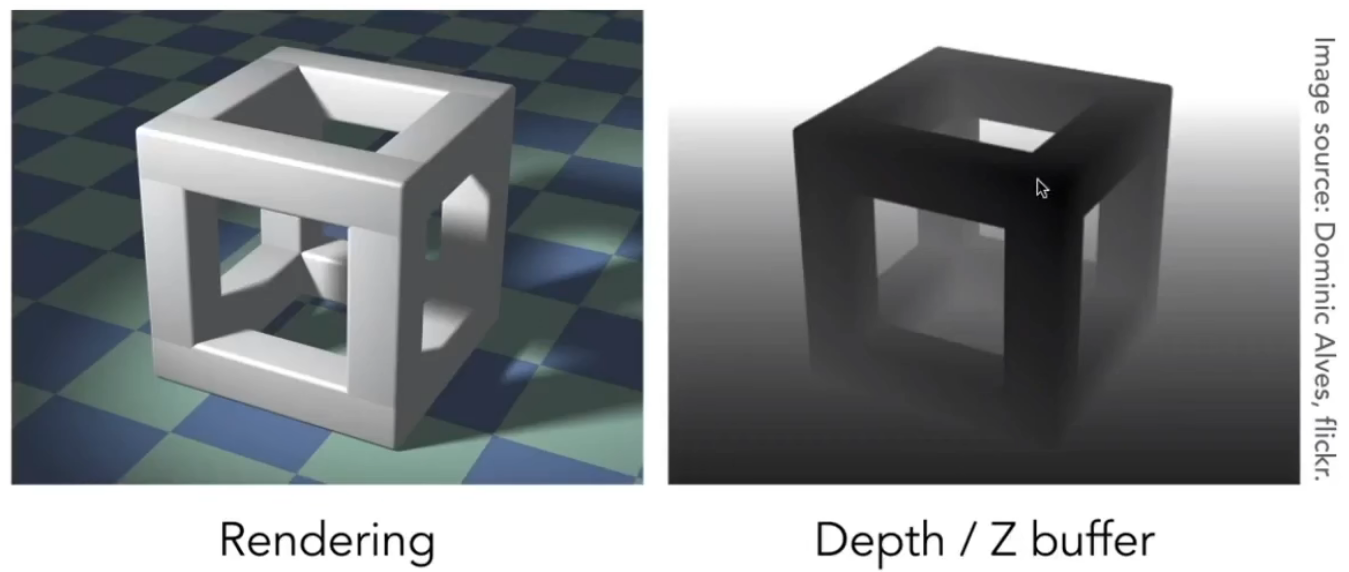
左边为渲染出的图片,右边为深度图
深度图中,越近越黑,越远越白
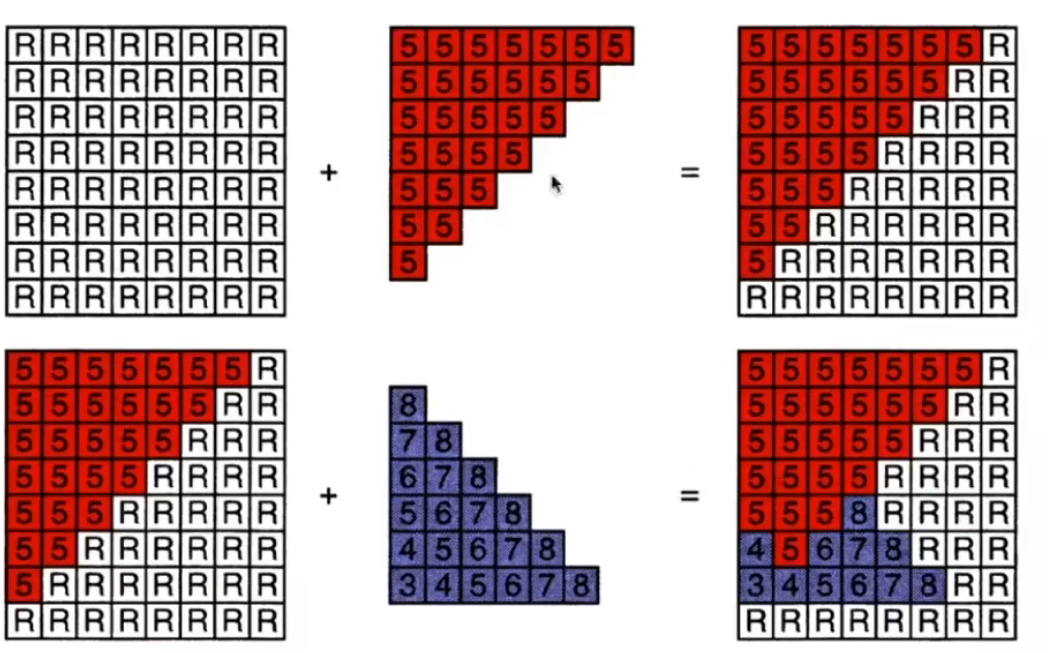
图中每个格子表示一个像素,先来了个一个三角形深度都是5,R表示无限大,则5比无限大小,可以覆盖;然后来了个新的三角形,根据深度信息进行覆盖操作
一般而言,n个三角形,每个三角形覆盖常数个像素,那么最终时间复杂度只是$O(n)$
着色
shading,引入物体的明暗的不同,颜色的不同,对不同的物体应用不同的材质的过程
Blinn-Phong反射模型
- 反射
- 高光
- 漫反射
- 间接光照

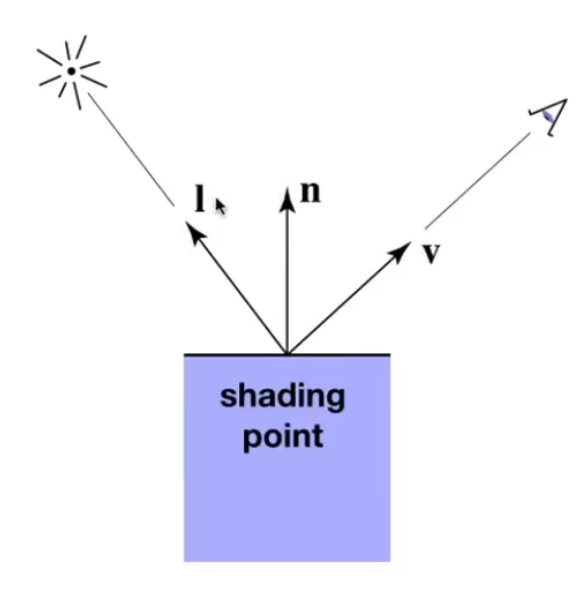
- 定义
- 在局部,比较小的范围内,物体表面是一个平面(无论物体长什么样)
- 定义垂直于平面的法线n
- 摄像机的观察方向v
- 看向光源的方向l
- 颜色color
- 光的亮度 shininess
所有的方向都是单位向量,只表示方向
漫反射
暂且只讨论某一个点的着色,也就是只考虑光照的方向,而不考虑照向这个点的光是不是被挡住了
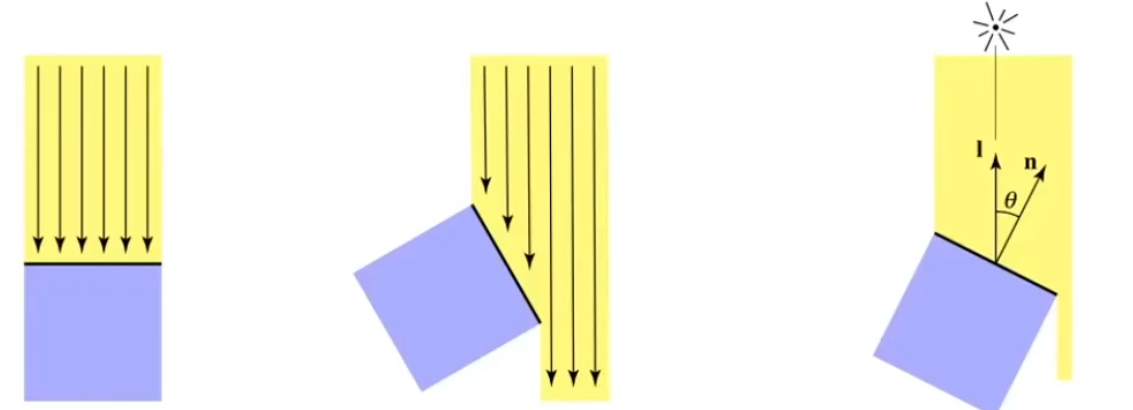
同一束光照,当紫色物体旋转时,其单位面积接收到的光变少,导致其变暗
任何一个着色点周围单位面积能接受到多少光照,与光线的角度成一定关系,从而引出Lambert's定律:接受到的光照与l和n的余弦(上图中的 $\cos \theta$)成正比
带入现实,一个是太阳能板,被照射面积越大热得越快;一个是四季,夏天是被太阳光直射
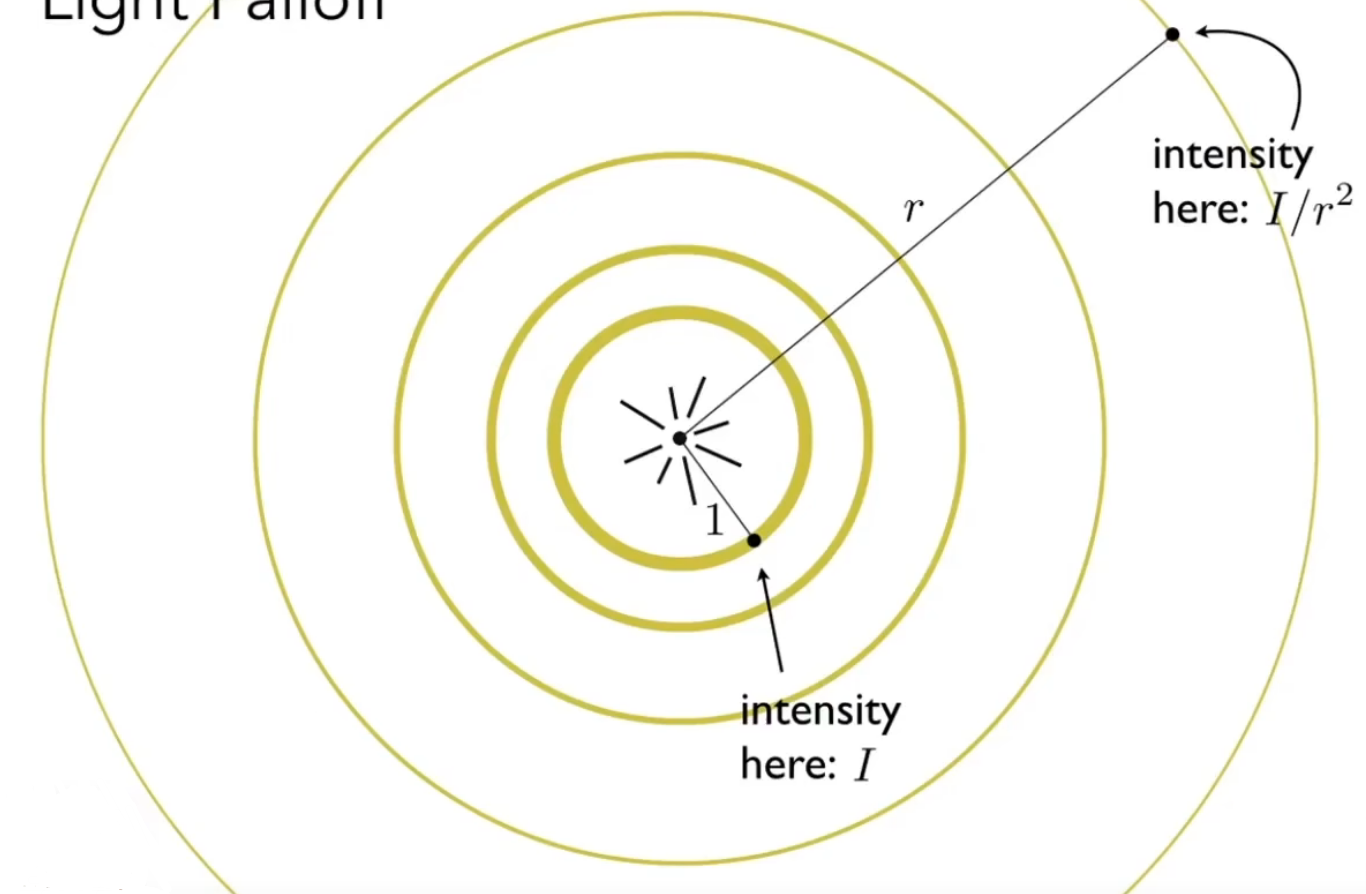
对于一个光源,某一瞬间,其发出的能量是固定的,而伴随着光线的传递,其蕴含的能量也逐渐分散(球壳,而不是圆形)
此时定义距离为1是,光线强度为I,当距离为r,则光纤强度为 $\frac{I}{r^2}$,通过这个式子可以算出当前传播到着色点的光照强度
通过上面两个公式,可以得到着色点(Shading Point)的光照强度、多少光会打在着色点上,得到计算式子
$$ L_d = k_d(I/r^2)max(0, n \cdot l) $$
- 上面的数学表达式就是漫反射的表示方法
- $k_d$漫反射的系数,表示这个点吸收多少能量(类似物体吸收所有颜色就是黑色,不吸收所有颜色就是白色的物理规律)
- $I/r^2$ 到达着色点的能量
- $max(0, n \cdot l)$ 接收了多少能量
为什么是$max(0, n \cdot l)$ ,$n \cdot l$也就是$\cos \theta$可能为负数,因为光线可能从物体下面往上发射,而这种光不具备物理意义(这里只讨论发射,不讨论折射)
漫反射的物理规律就是看一个物体无论从什么角度看都是一样的,而上面的$L_d$式子刚好与观察方向v没有任何关系
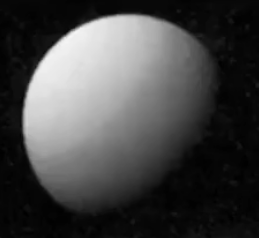
通过前面的解释,可以清楚的了解为什么这个球是渐变的,从亮变灰再变黑
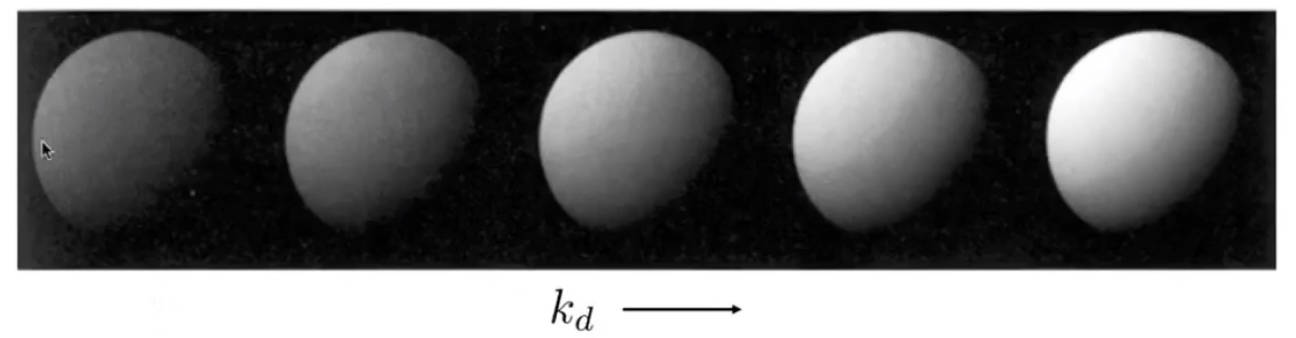
通过定义$k_d$颜色系数,可以定义该物体整体上的明暗
几何
如何表示光滑的曲线、曲面、将简单曲面通过细分的方法得到复杂曲面、形状发生变化时面如何变化、如何保持物体的拓扑结构…