
README.md 25 KB
AI
行为树
https://zhuanlan.zhihu.com/p/608864183

运行行为树之前
LoadTree
获取当前的 BehaviorTreeManager,每个 UWorld 中都有一个 AISystem 属性,用于 AI 管理,而 AISystem 中存储着 BehaviorTreeManager
UBehaviorTreeManager* UBehaviorTreeManager::GetCurrent(UWorld* World)
{
UAISystem* AISys = UAISystem::GetCurrentSafe(World);
return AISys ? AISys->GetBehaviorTreeManager() : nullptr;
}
在 UBehaviorTreeComponent::PushInstance 中会通过 BTManager 来加载行为树
const bool bLoaded = BTManager->LoadTree(TreeAsset, RootNode, InstanceMemorySize);
通过 LoadTree 函数或者该行为树实例所占内存大小 InstanceMemorySize 和根节点 Root
通过 UBehaviorTreeManager::LoadedTemplates 缓存加载过的 UBehaviorTree 资产信息,如果加载过直接从缓存中获取 InstanceMemorySize 和 Root
如果没有加载过该 UBehaviorTree 资产,则开始加载
由于一个
World的UBehaviorTreeManager是唯一的,所以理论上来说每个资产只会被加载一次
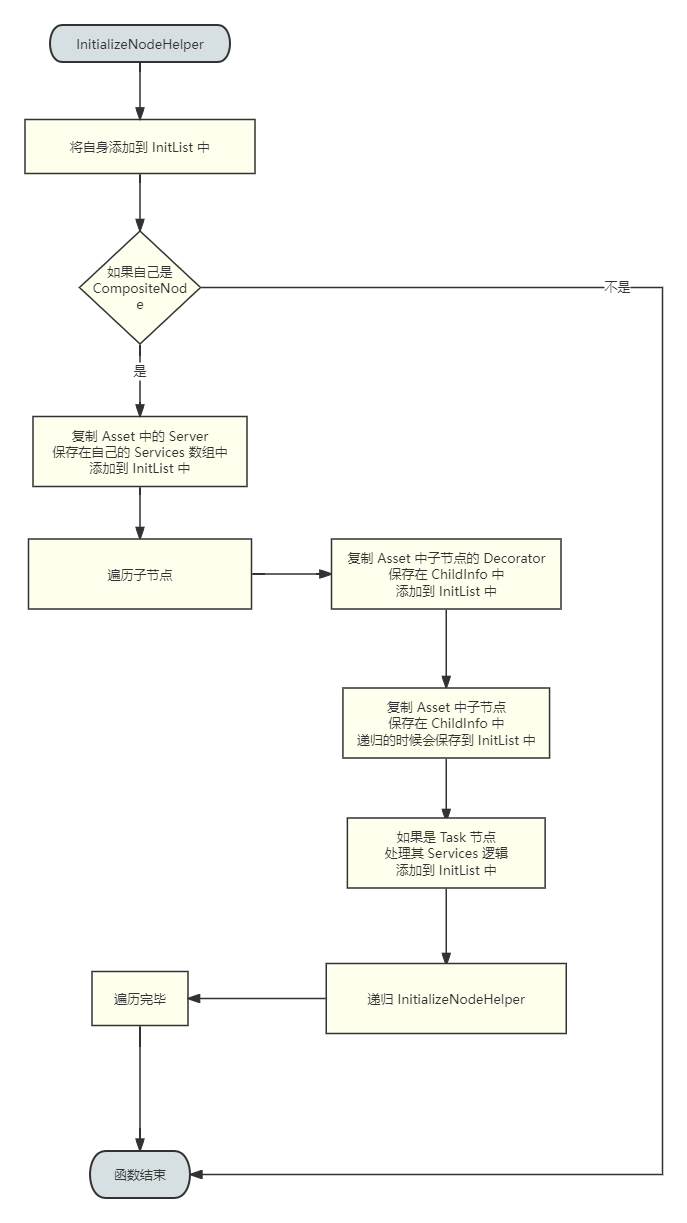
首先通过 InitializeNodeHelper 来缓存所有节点信息
TArray<FBehaviorTreeNodeInitializationData> InitList;
uint16 ExecutionIndex = 0;
InitializeNodeHelper(NULL, TemplateInfo.Template, 0, ExecutionIndex, InitList, Asset, this);
TemplateInfo.Template就是 根节点 的复制体
然后计算每个节点占用的内存大小,计算并设置数据内存偏移
for (int32 Index = 0; Index < InitList.Num(); Index++)
{
InitList[Index].Node->InitializeNode(InitList[Index].ParentNode, InitList[Index].ExecutionIndex, InitList[Index].SpecialDataSize + MemoryOffset, InitList[Index].TreeDepth);
MemoryOffset += InitList[Index].DataSize;
}
在运行时,会将每个节点的数据都保存在一个连续内存中,通过各自节点的 MemoryOffset 直接从连续内存中获取对应的数据
InitializeNodeHelper
虽然函数名字是 InitializeNode,其实是 复制 + 初始化,因为函数中充斥着 StaticDuplicateObject
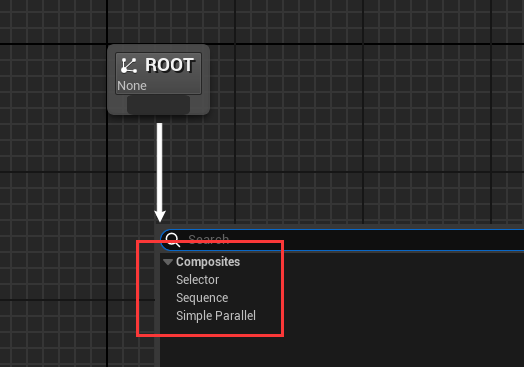
首先,根节点一定是 UBTCompositeNode,从上图就可以看到 Root 下只能连接且只能连接一个 UBTCompositeNode
Composite: 组合,混合
作为 UBTCompositeNode 自然保存着 子节点 和挂载在自己身上的 Serve 节点
UCLASS(Abstract, MinimalAPI)
class UBTCompositeNode : public UBTNode
{
TArray<FBTCompositeChild> Children;
TArray<TObjectPtr<UBTService>> Services;
// some function else ...
}
struct FBTCompositeChild
{
TObjectPtr<UBTCompositeNode> ChildComposite = nullptr;
TObjectPtr<UBTTaskNode> ChildTask = nullptr;
TArray<TObjectPtr<UBTDecorator>> Decorators;
TArray<FBTDecoratorLogic> DecoratorOps;
};
FBTCompositeChild代表子节点,根据ChildComposite和ChildTask的属性是否有效来判断是CompositeNode还是TaskNode

由于根节点是 UBTCompositeNode,它不能也不应该存在 UBTDecorator,所以在上图中,根节点的 UBTDecorator 是深蓝色的,表示无效
回到 InitializeNodeHelper 函数中
创建 FBehaviorTreeInstance
FBehaviorTreeInstance 用于管理一个行为树实例
通过 BTManager->LoadTree 得到 RootNode 和 InstanceMemorySize,既行为树的根节点和数据所占内存大小
FBehaviorTreeInstance& NewInstance = InstanceStack.AddDefaulted_GetRef();
NewInstance.InstanceIdIndex = UpdateInstanceId(&TreeAsset, ActiveNode, InstanceStack.Num() - 1);
NewInstance.RootNode = RootNode;
NewInstance.ActiveNode = NULL;
NewInstance.ActiveNodeType = EBTActiveNode::Composite;
// initialize memory and node instances
FBehaviorTreeInstanceId& InstanceInfo = KnownInstances[NewInstance.InstanceIdIndex];
int32 NodeInstanceIndex = InstanceInfo.FirstNodeInstance;
const bool bFirstTime = (InstanceInfo.InstanceMemory.Num() != InstanceMemorySize);
if (bFirstTime)
{
InstanceInfo.InstanceMemory.AddZeroed(InstanceMemorySize);
InstanceInfo.RootNode = RootNode;
}
NewInstance.SetInstanceMemory(InstanceInfo.InstanceMemory);
NewInstance.Initialize(*this, *RootNode, NodeInstanceIndex, bFirstTime ? EBTMemoryInit::Initialize : EBTMemoryInit::RestoreSubtree);
InstanceIdIndex是为了解决嵌套行为树执行时,方便实例识别
| 参数类型 | 属性 | 作用 |
|---|---|---|
| UBTCompositeNode* | RootNode | 行为树根节点 |
| UBTNode* | ActiveNode | 当前正在执行的节点 |
| TArray | ActiveAuxNodes | 存储当前激活的辅助节点() |
| TArray | ParallelTasks | 并行节点的多个任务 |
| TArray | InstanceMemory | 节点运行实例的数据 |
| uint8 | InstanceIdIndex | 行为树实例的ID,对应 KnowInstances 数组的唯一实例 |
| FBTInstanceDeactivation | DeactivationNotify | 当前活动节点的类型 |
| FBTInstanceDeactivation | DeactivationNotify | 子树停用时的回调委托 |


| 枚举值 | 含义 |
|---|---|
| Succeeded | 运行成功 |
| Failed | 运行失败 |
| Aborted | 被打断 |
| InProgress | 正在运行中 |
UBTTask_BlueprintBase 是最经常使用的行为树 Task 节点,用于蓝图中实现任务节点功能
在 UBTTask_BlueprintBase::ExecuteTask 函数中,会判断是否存在 AIOwner,以此判断执行 ReceiveExecuteAI 还是 ReceiveExecute

EBTNodeResult::Type UBTTask_BlueprintBase::ExecuteTask(UBehaviorTreeComponent& OwnerComp, uint8* NodeMemory)
{
CurrentCallResult = (ReceiveExecuteImplementations != 0 || ReceiveTickImplementations != 0) ? EBTNodeResult::InProgress : EBTNodeResult::Failed;
bIsAborting = false;
bStoreFinishResult = true;
// 执行 ReceiveExecuteAI 或者 ReceiveExecute
bStoreFinishResult = false;
return CurrentCallResult;
}
ExecutTask 返回的是 CurrentCallResult,这个值通常来说默认是 InProgress
如果在 ReceiveExecuteAI 接口中调用了 FinishExecute 接口,则会根据输入的 bSuccess 来重新设置 CurrentCallResult 为 Succeeded 或者 Failed
在执行节点逻辑之前,会设置 bStoreFinishResult 为 true,这样如果 Task 是同步执行结束的,就直接修改 CurrentCallResult 的值即可,直接返回运行结果
如果 Task 的执行内容是异步的,那么 ExecutTask 默认返回 InProgress,等 FinishExecute 的时候再通过 FinishLatentTask 通知 UBTComonent
void UBTTask_BlueprintBase::FinishExecute(bool bSuccess)
{
UBehaviorTreeComponent* OwnerComp = Cast<UBehaviorTreeComponent>(GetOuter());
const EBTNodeResult::Type NodeResult(bSuccess ? EBTNodeResult::Succeeded : EBTNodeResult::Failed);
if (bStoreFinishResult)
{
CurrentCallResult = NodeResult;
}
else if (OwnerComp && !bIsAborting)
{
FinishLatentTask(*OwnerComp, NodeResult);
}
}
在执行 ReceiveExecuteAI 之前 bStoreFinishResult 值为 true,也就是说如果 ReceiveExecuteAI 函数中调用了 FinishExecute 会修改 CurrentCallResult 的值,并直接作为 ExecuteTask 函数返回值返回回去
当 UBTTaskNode 执行完毕之后,通常会调用 FinishLatentTask,通知 UBTComponent 该节点运行完毕,该去查找下一个可用节点了
void UBTTaskNode::FinishLatentTask(UBehaviorTreeComponent& OwnerComp, EBTNodeResult::Type TaskResult) const
{
UBTTaskNode* TemplateNode = (UBTTaskNode*)OwnerComp.FindTemplateNode(this);
OwnerComp.OnTaskFinished(TemplateNode, TaskResult);
}
一个 Decorator 的执行
UBTDecorator 作为装饰器,表示当前节点及其子节点能否运行
FlowAbortMode 类型
UBTDecorator 可以打断自身节点、低优先级节点的运行
| 打断类型 | 作用 |
|---|---|
| None | 不打断 |
| LowerPriority | 打断低优先级 |
| Self | 打断自身 |
| Both | 打断自身并且打断低优先级 |
行为树节点从左到右,优先级从高到低
CompositeNode 常用的是两种:Sequence 和 Selector,还有一个 SimpleParallel
| Sequence 中的 Observer aborts | Selector 中的 Observer aborts |
|---|---|
 |
 |
Sequence中不能使用LowerPriority和Both,因为Sequence是顺序执行所有节点,必须完成当前任务才能继续下一个,中断会破坏的连续性Selector没有LowerPriority和Both的限制
那么如何实现 UBTDecorator 在不同的 CompositeNode 中,显示不同的 Observer aborts 选项
答案是通过 FBehaviorDecoratorDetails 自定义细节面板和 CompositeNode 的成员函数 CanAbortLowerPriority、 CanAbortSelf
UBTCompositeNode* MyParentNode = MyDecorator ? MyDecorator->GetParentNode() : NULL;
const bool bAllowAbortNone = MyDecorator == NULL || MyDecorator->bAllowAbortNone;
const bool bAllowAbortSelf = (MyDecorator == NULL || MyDecorator->bAllowAbortChildNodes) && (MyParentNode == NULL || MyParentNode->CanAbortSelf());
const bool bAllowAbortLowerPriority = (MyDecorator == NULL || MyDecorator->bAllowAbortLowerPri) && (MyParentNode == NULL || MyParentNode->CanAbortLowerPriority());
UBTDecorator 并没有 Observer aborts 属性,属性数值的绑定当然也是通过自定义细节面板实现的
// 显示名称
FText AbortModeDesc = LOCTEXT("ObserverTitle","Observer aborts");
// 获取属性
ModeProperty = DetailLayout.GetProperty(GET_MEMBER_NAME_CHECKED(UBTDecorator, FlowAbortMode));
// 设置属性显示名称
ModeProperty->CreatePropertyNameWidget(AbortModeDesc)
Observer aborts本质上还是修改FlowAbortMode属性
| Sequence | Selector | Simple_Parallel |
|---|---|---|
 |
没有重写,都可以 |  |
除了 CompositeNode 限制了 FlowAbortMode 之外,每个 UBTDecorator 也可以自行通过设置属性参数来限制 FlowAbortMode
| 属性 | 作用 |
|---|---|
| bAllowAbortNone | 是否允许 Abort None |
| bAllowAbortLowerPri | 是否允许 Abort Low Priority |
| bAllowAbortChildNodes | 是否允许 打断子节点 也就是 Self |
这些属性默认都是 true,即全部允许
比如 UBTDecorator_TimeLimit 的构造函数中设置了 bAllowAbortLowerPri 和 bAllowAbortNone 为 false
因为 UBTDecorator_TimeLimit 设计的目的就是为了限制自身的运行时间,所以它的 FlowAbortMode 只能是 Self
CalculateRawConditionValue
判断能否执行的核心逻辑
以 UBTDecorator_Cooldown 为例,获取当前时间和上次执行时间,判断时间差值是否符合CD需求
bool UBTDecorator_Cooldown::CalculateRawConditionValue(UBehaviorTreeComponent& OwnerComp, uint8* NodeMemory) const
{
FBTCooldownDecoratorMemory* DecoratorMemory = CastInstanceNodeMemory<FBTCooldownDecoratorMemory>(NodeMemory);
const double TimePassed = (OwnerComp.GetWorld()->GetTimeSeconds() - DecoratorMemory->LastUseTimestamp);
return TimePassed >= CoolDownTime;
}
也不是所有的 Decorator 都是通过 CalculateRawConditionValue 来中断行为树运行的,比如 UBTDecorator_TimeLimit
UBTDecorator_TimeLimit 直接没有重写 CalculateRawConditionValue 让其返回默认的 true,设置自己的 FlowAbortMode 为 Self,在倒计时结束之后直接调用 OwnerComp.RequestExecution 来中断节点的执行
void UBTDecorator_TimeLimit::TickNode(UBehaviorTreeComponent& OwnerComp, uint8* NodeMemory, float DeltaSeconds)
{
OwnerComp.RequestExecution(this);
}
不过,通常来说 蓝图 通过继承 UBTDecorator_BlueprintBase 实现功能
bool UBTDecorator_BlueprintBase::CalculateRawConditionValue(UBehaviorTreeComponent& OwnerComp, uint8* NodeMemory) const
{
bool CurrentCallResult = false;
// 根据是否是 AIOwner 执行 PerformConditionCheckAI 或者 PerformConditionCheck
return CurrentCallResult;
}
如果 UBTDecorator 的 FlowAbortMode 不是 None,表示该节点存在打断行为
FlowAbortMode 值为 None,表示只在判断是否激活节点的时候进行一次判断。如果 FlowAbortMode 为其他值,会在 TickNode 中再次触发 CalculateRawConditionValue 判断当前运行的节点能否继续运行
注意:这里 当前运行的节点 并不一定是该
UBTDecorator的子节点,也可能是低优先级节点

if (FlowAbortMode == EBTFlowAbortMode::None)
{
return EAbortType::NoAbort;
}
EAbortType AbortType = EAbortType::NoAbort;
if (bIsOnActiveBranch)
{
if ((FlowAbortMode == EBTFlowAbortMode::Self || FlowAbortMode == EBTFlowAbortMode::Both) && CalculateRawConditionValue(OwnerComp, /*NodeMemory*/nullptr) == IsInversed())
{
AbortType = EAbortType::DeactivateBranch;
}
}
else
{
if ((FlowAbortMode == EBTFlowAbortMode::LowerPriority || FlowAbortMode == EBTFlowAbortMode::Both) && CalculateRawConditionValue(OwnerComp, /*NodeMemory*/nullptr) != IsInversed())
{
AbortType = EAbortType::ActivateBranch;
}
}
- 如果
UBTDecorator的FlowAbortMode是None直接return掉 - 如果
UBTDecorator在当前正在运行的节点上,通过CalculateRawConditionValue判断当前节点能否继续运行 - 如果
UBTDecorator不在正在运行的节点上,通过CalculateRawConditionValue判断是否中断正在运行的节点并切换到自己的节点

BTD_Test的Check永远返回 true
上面这种情况的执行情况是怎样的呢?
- 运行
BT_Task - 通过
BTD_Test的Check,执行Wait A - 执行
Wait B - 触发
BTD_Test的TickNode,进而触发Check,打断Wait B执行Wait A - 重复执行 3 ~ 4
生命周期函数

执行顺序是
- Activated
- Start
- Deactivated
- Finish
Start 和 Finish 是一定会调用的, 但是 Activated 和 Deactivated 不是每次激活都会调用
查找可执行的 Task
查找并执行可执行的节点,分为两部分 RequestExecution 和 ProcessExecutionRequest
通过 RequestExecution 节点的查找范围,并发起请求。只是发起请求,不是真正的开始执行
真正执行是在 TickComponent 中调用 ProcessExecutionRequest 来执行的
RequestExecution
AIMODULE_API void RequestExecution(const UBTCompositeNode* RequestedOn, const int32 InstanceIdx,
const UBTNode* RequestedBy, const int32 RequestedByChildIndex,
const EBTNodeResult::Type ContinueWithResult, bool bStoreForDebugger = true);
void RequestExecution(const UBTDecorator* RequestedBy) { check(RequestedBy); RequestBranchEvaluation(*RequestedBy); }
void RequestExecution(EBTNodeResult::Type ContinueWithResult) { RequestBranchEvaluation(ContinueWithResult); }
后两个重载的方法,最后还是会调到第一个 RequestExecution
| 形式参数 | 作用 |
|---|---|
| RequestedOn | 发起请求节点父节点 |
| InstanceIdx | FBehaviorTreeInstance 在 UBTComponent::InstanceStack 中的序号 |
| RequestedBy | 发起请求的节点,可能是 Task、Decorator、CompositeNode |
| RequestedByChildIndex | 发起请求节点的序号 |
| ContinueWithResult | 发起请求的原因 |
常规调用方法,例如: RequestExecution(RequestedBy.GetParentNode(), InstanceIdx, &RequestedBy, RequestedBy.GetChildIndex(), EBTNodeResult::Aborted);
RequestExecution 函数主要的作用为了填充 ExecutionRequest 的成员属性
struct FBTNodeExecutionInfo
{
FBTNodeIndex SearchStart;
FBTNodeIndex SearchEnd;
const UBTCompositeNode* ExecuteNode;
uint16 ExecuteInstanceIdx;
TEnumAsByte<EBTNodeResult::Type> ContinueWithResult;
uint8 bTryNextChild : 1;
uint8 bIsRestart : 1;
};
它本质上是一个执行指令包,告诉行为树组件
- 从哪里开始搜索(SearchStart)
- 到哪里结束搜索(SearchEnd)
- 从哪个节点开始执行(ExecuteNode)
- 如何继续执行(ContinueWithResult + 标志位)
通过 SearchStart 和 SearchEnd 来限定行为树的搜索范围,避免全树扫描,实现局部搜索优化,只检查特定分支
- 在中断场景中,限定只搜索高优先级分支
- 在组合节点中,限定只搜索当前子分支
由于同一帧可能存在多次 RequestExecution 会与上次计算缓存的 ExecutionRequest 进行优先级对比
根据 InstanceIdnex 大小 和 ExecutionIndex 大小 进行比较,值越小优先级越高
const bool bSwitchToHigherPriority = (ContinueWithResult == EBTNodeResult::Aborted);
const bool bAlreadyHasRequest = (ExecutionRequest.ExecuteNode != NULL);
根据 ContinueWithResult 是否是 Aborted 来判断是否应该切换到更高优先级节点
if(bSwitchToHigherPriority)
{
// 找到 RequestOn 和 ActiveInstance.ActiveNode 的共同父节点
// ExecutionRequest.ExecuteNode = 共同父节点
}
else {
// 如果 RequestedOn 能正常执行
// ExecutionRequest.ExecuteNode = RequestedOn
}

比如上面这种情况,ExecutionRequest.ExecuteNode 的值为 Sequence 这个 CompositeNode
ProcessExecutionRequest
在 TickComponent 中进行判断是否执行
如果当前 当前执行的节点 和 ExecutionRequest.ExecuteNode 请求执行节点不同,那么先将当前执行节点 Deactive 掉,通过 DeactivateUpTo 函数
当前执行节点是 InstanceStack[ActiveInstanceIdx].ActiveNode
将 ExecutionRequest 信息同步更新到 SearchData 中
UBTTaskNode* NextTask = NULL;
const UBTCompositeNode* TestNode = ExecutionRequest.ExecuteNode;
接下来通过 while 循环,不停更新 NextTask 和 TestNode 的值,直到找到能够执行的那个
while (TestNode && NextTask == NULL)
{
const int32 ChildBranchIdx = TestNode->FindChildToExecute(SearchData, NodeResult);
const UBTNode* StoreNode = TestNode;
if (SearchData.bPostponeSearch)
{
// break out of current search loop
TestNode = NULL;
bIsSearchValid = false;
}
else if(ChildBranchIdx == BTSpecialChild::ReturnToParent)
{
}
else if (TestNode->Children.IsValidIndex(ChildBranchIdx))
{
NextTask = TestNode->Children[ChildBranchIdx].ChildTask;
TestNode = TestNode->Children[ChildBranchIdx].ChildComposite;
}
}
还记得吗 ChildTask 和 ChildComposite 只有一个是有效的
通过 TestNode->FindChildToExecute 找到可以执行的节点
最后调用 ProcessPendingExecution 去执行 ExecuteTask