
 Nicetry12138
21ba4dcb70
feat: 添加 AIMoveTo 代码解析
Nicetry12138
21ba4dcb70
feat: 添加 AIMoveTo 代码解析
|
1 éve | |
|---|---|---|
| .. | ||
| Image | 1 éve | |
| README.md | 1 éve | |
README.md
AI
关于 AI 寻路
路径规划
Navigation 是 Unreal 和 Unity 都在使用的经典导航网格生成算法,通过体素化、凸多边形划分、寻路、路径优化 等几步就可以实现 AI 智能体的路径搜索功能
关于寻路算法有很多种:A*、JSP、广搜等
AI 避障
https://www.red3d.com/cwr/steer/gdc99/
https://www.bilibili.com/video/BV1Nb421n7qJ
https://www.bilibili.com/video/BV1yCqfYuEh1
AI 路径规划 和 AI 避障 属于两个不同业务范畴,路径规划决定大的方向,避障更属于角色行为
所以对于 AI 系统来说,一般将路径规划和避障拆分实现
Unreal 的 CharacterMovement 支持 RVO 避障,不过需要勾选
关于 AI 决策
- 状态机
- 行为树
- GOAP
关于 Unreal 中的 AI 模块
如何让 AI 动起来
通过 UAITask_MoveTo 请求移动
通过 UAITask_MoveTo::AIMoveTo 函数可以窥探一二
UFUNCTION(BlueprintCallable, Category = "AI|Tasks", meta = (AdvancedDisplay = "AcceptanceRadius,StopOnOverlap,AcceptPartialPath,bUsePathfinding,bUseContinuousGoalTracking,ProjectGoalOnNavigation", DefaultToSelf = "Controller", BlueprintInternalUseOnly = "TRUE", DisplayName = "Move To Location or Actor"))
static AIMODULE_API UAITask_MoveTo* AIMoveTo(AAIController* Controller, FVector GoalLocation, AActor* GoalActor = nullptr,
float AcceptanceRadius = -1.f, EAIOptionFlag::Type StopOnOverlap = EAIOptionFlag::Default, EAIOptionFlag::Type AcceptPartialPath = EAIOptionFlag::Default,
bool bUsePathfinding = true, bool bLockAILogic = true, bool bUseContinuousGoalTracking = false, EAIOptionFlag::Type ProjectGoalOnNavigation = EAIOptionFlag::Default);
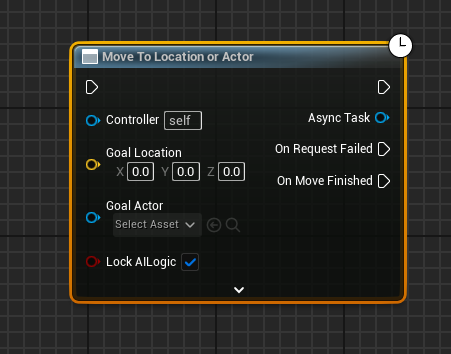
通过 DisplayName = "Move To Location or Actor" 可以知道该函数在蓝图中显示的名字是 Move To Location Or Actor
在该函数中,将创建了一个 UAITask_MoveTo 对象,将各种输入参数构建成 FAIMoveRequest 对象,最后将 FAIMoveRequest 和输入的 Controller 设置到 UAITask_MoveTo 对象中
- 创建
FAIMoveRequest
FAIMoveRequest MoveReq;
if (InGoalActor)
{
MoveReq.SetGoalActor(InGoalActor);
}
else
{
MoveReq.SetGoalLocation(InGoalLocation);
}
MoveReq.SetAcceptanceRadius(AcceptanceRadius);
MoveReq.SetReachTestIncludesAgentRadius(FAISystem::PickAIOption(StopOnOverlap, MoveReq.IsReachTestIncludingAgentRadius()));
MoveReq.SetAllowPartialPath(FAISystem::PickAIOption(AcceptPartialPath, MoveReq.IsUsingPartialPaths()));
MoveReq.SetUsePathfinding(bUsePathfinding);
MoveReq.SetProjectGoalLocation(FAISystem::PickAIOption(ProjectGoalOnNavigation, MoveReq.IsProjectingGoal()));
if (Controller)
{
MoveReq.SetNavigationFilter(Controller->GetDefaultNavigationFilterClass());
}
- 设置
UAITask_MoveTo
MyTask->SetUp(Controller, MoveReq);
MyTask->SetContinuousGoalTracking(bUseContinuousGoalTracking);
if (bLockAILogic)
{
MyTask->RequestAILogicLocking();
}
在创建完 UAITask_MoveTo 之后,会自动执行 Activate 方法
void UAITask_MoveTo::Activate()
{
Super::Activate();
UE_CVLOG(bUseContinuousTracking, GetGameplayTasksComponent(), LogGameplayTasks, Log, TEXT("Continuous goal tracking requested, moving to: %s"),
MoveRequest.IsMoveToActorRequest() ? TEXT("actor => looping successful moves!") : TEXT("location => will NOT loop"));
MoveRequestID = FAIRequestID::InvalidRequest;
ConditionalPerformMove();
}
在 ConditionalPerformMove 函数中,检查 Controller 能否更新 Path 状态
- 如果可以,则直接调用
PerformMove - 如果不可以,则启动定时器,定时重复调用
ConditionalPerformMove检查是否可行
void UAITask_MoveTo::ConditionalPerformMove()
{
if (MoveRequest.IsUsingPathfinding() && OwnerController && OwnerController->ShouldPostponePathUpdates())
{
UE_VLOG(GetGameplayTasksComponent(), LogGameplayTasks, Log, TEXT("%s> can't path right now, waiting..."), *GetName());
OwnerController->GetWorldTimerManager().SetTimer(MoveRetryTimerHandle, this, &UAITask_MoveTo::ConditionalPerformMove, 0.2f, false);
}
else
{
MoveRetryTimerHandle.Invalidate();
PerformMove();
}
}
在
AIController的ShouldPostponePathUpdates方法中就是检查PathFollowingComponent有没有被创建或者初始化
在 PerformMove 方法中,通过将 MoveRequest 对象设置给 AIController,并以此获得 FNavPathSharedPtr 对象 和 FPathFollowingRequestResult 状态
// start new move request
FNavPathSharedPtr FollowedPath;
const FPathFollowingRequestResult ResultData = OwnerController->MoveTo(MoveRequest, &FollowedPath);
// ... do something
switch (ResultData.Code)
{
// ..... do something
case EPathFollowingRequestResult::RequestSuccessful:
MoveRequestID = ResultData.MoveId;
PathFinishDelegateHandle = PFComp->OnRequestFinished.AddUObject(this, &UAITask_MoveTo::OnRequestFinished);
SetObservedPath(FollowedPath);
// ..... do something
}
所以说,UAITask_MoveTo 本质上不处理 AI 移动逻辑,而是交给 AIController 做,自己只是监听一个结果和状态而已
在 PerformMove 中 UAITask_MoveTo 监听了 OnRequestFinished 结束事件
在 SetObservedPath 中 UAITask_MoveTo 监听了导航中路径相关事件
- 导航路径事件枚举
UENUM()
namespace ENavPathEvent
{
enum Type : int
{
Cleared,
NewPath,
UpdatedDueToGoalMoved,
UpdatedDueToNavigationChanged,
Invalidated,
RePathFailed,
MetaPathUpdate,
Custom,
};
}
- 监听事件变换
Path->EnableRecalculationOnInvalidation(false);
PathUpdateDelegateHandle = Path->AddObserver(FNavigationPath::FPathObserverDelegate::FDelegate::CreateUObject(this, &UAITask_MoveTo::OnPathEvent));
- 根据事件触发枚举,更新自身状态
void UAITask_MoveTo::OnPathEvent(FNavigationPath* InPath, ENavPathEvent::Type Event)
{
const static UEnum* NavPathEventEnum = StaticEnum<ENavPathEvent::Type>();
switch (Event)
{
case ENavPathEvent::NewPath:
case ENavPathEvent::UpdatedDueToGoalMoved:
case ENavPathEvent::UpdatedDueToNavigationChanged:
// ... Do Something
FinishMoveTask(EPathFollowingResult::Aborted);
break;
case ENavPathEvent::Invalidated:
ConditionalUpdatePath();
break;
case ENavPathEvent::Cleared:
case ENavPathEvent::RePathFailed:
FinishMoveTask(EPathFollowingResult::Aborted);
break;
case ENavPathEvent::MetaPathUpdate:
default:
break;
}
}
在执行 EndTask 的时候(基类实现),会触发 OnDestroy 方法,在 OnDestroy 方法中让 AIController 停止移动,清空 Path 引用
ResetObservers();
ResetTimers();
if (MoveRequestID.IsValid())
{
UPathFollowingComponent* PFComp = OwnerController ? OwnerController->GetPathFollowingComponent() : nullptr;
if (PFComp && PFComp->GetStatus() != EPathFollowingStatus::Idle)
{
PFComp->AbortMove(*this, FPathFollowingResultFlags::OwnerFinished, MoveRequestID);
}
}
Path = nullptr;
所以综上所述, UAITask_MoveTo 本身不做移动处理,将请求转发给 AIController,然后监听一下移动结束和移动状态,再将对应的状态透传出来
AIController 控制移动
AIController 控制智能体移动的入口就是 AAIController::MoveTo
首先需要注意 FAIMoveRequest 结构体
注意到 Move To Location Or Actor 可以传入 Actor 也可以传入 Location,所以 FAIMoveRequest 需要存储这些信息
在 UAITask_MoveTo 中设置就有这段代码
if (InGoalActor)
{
MoveReq.SetGoalActor(InGoalActor);
}
else
{
MoveReq.SetGoalLocation(InGoalLocation);
}
所以如果同时设置了 GoalActor 和 GoalLocation,会使用 GoalActor
在 AAIController::MoveTo 中会判断 GoalActor 的坐标是否有效
if (MoveRequest.GetGoalLocation().ContainsNaN() || FAISystem::IsValidLocation(MoveRequest.GetGoalLocation()) == false)
{
UE_VLOG(this, LogAINavigation, Error, TEXT("AAIController::MoveTo: Destination is not valid! Goal(%s)"), TEXT_AI_LOCATION(MoveRequest.GetGoalLocation()));
bCanRequestMove = false;
}
然后会将 GoalActor 坐标映射到导航网格上,具体的代码在 UNavigationSystemV1::ProjectPointToNavigation 中
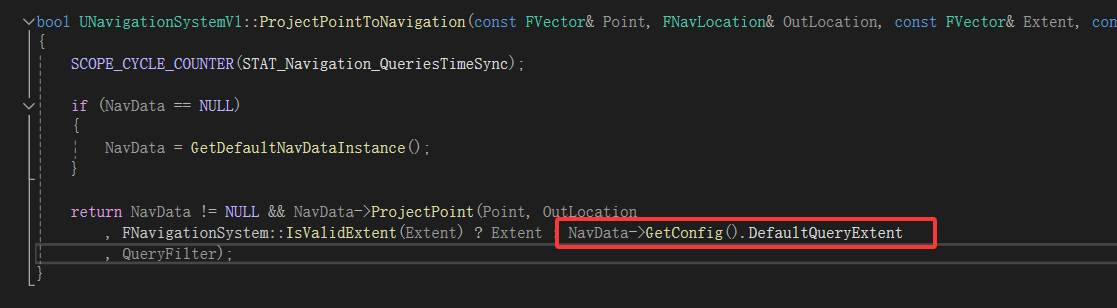
DefaultQueryExtent 的值默认是 (50, 50, 50)
