|
|
@@ -28,8 +28,55 @@
|
|
|
| Corwds In A Polygon Soup: Next-Gen Path Planning | David Miles | 2006 |
|
|
|
| Recast Navigation | Mikko Mononen | 2008 |
|
|
|
|
|
|
-1. **Meadow Mapping**
|
|
|
+### **Meadow Mapping**
|
|
|
|
|
|
Ronald C. Arkin 是一位美国计算机科学家,他在 1987 年发表了一篇论文 **《Path planning for a vision-based autonomous robot》** ,介绍了 `Meadow mapping` 的原理和实现
|
|
|
|
|
|
-Meadow mapping 是一种用于生成导航网格的方法,它将自由空间分解成凸多边形的集合,然后以每个凸多边形的边缘中点作为寻路节点,使用 A* 算法进行寻路
|
|
|
+Meadow mapping 是一种用于生成导航网格的方法,它将自由空间分解成**凸多边形**的集合,然后以每个凸多边形的边缘中点作为寻路节点,使用 A* 算法进行寻路。它还可以根据不同的地形类型(如人行道,草地,砾石等)设置不同的代价函数,优化寻路结果。它是现代 Navmesh 系统的雏形。
|
|
|
+
|
|
|
+[Path planning for a vision-based autonomous robot 论文](https://www.researchgate.net/publication/356666030_Path_Planning_for_Autonomous_Mobile_Robots_A_Review))
|
|
|
+
|
|
|
+[路径导航算法示例](https://github.com/zhm-real/PathPlanning)
|
|
|
+
|
|
|
+`Meadow Mapping` 提出一个概念:把世界**凸多边形化**
|
|
|
+
|
|
|
+为什么是凸多边形?
|
|
|
+
|
|
|
+1. 凸多边形内任意俩点连接不会超出多边形区域
|
|
|
+2. 凸多边形边上的点便于做寻路最小单位
|
|
|
+
|
|
|
+凸多边形内部不需要寻路
|
|
|
+
|
|
|
+我们只需要将世界划分成多个凸多边形,那么就只需要研究凸多边形之间如何连通即可,凸多边形内部直接一根直线连接即可
|
|
|
+
|
|
|
+于是我们将寻路问题转换为以凸多边形**边缘中心为节点**的图论搜索问题
|
|
|
+
|
|
|
+为什么不用 `Grid` (网格) ?
|
|
|
+
|
|
|
+对于大面积的开放区域来说,格子作为寻路基本单位则数量庞大;但是一个凸多边形可以是一个很大的区域,所以对于寻路来凸多边形的效率更高
|
|
|
+
|
|
|
+所以一个寻路流程大概如下
|
|
|
+
|
|
|
+1. 得到一个 3D 场景
|
|
|
+2. 获得可行走区域 `Reachable Space`(以前是手动绘制,现在可以自动绘制)
|
|
|
+3. 将可行走区域划分成多个凸多边形 `Convexify the Space`
|
|
|
+4. 凸多边形为单位,继续路径查询 `Path Finding`
|
|
|
+5. 路径改进,得到更为平滑的路径
|
|
|
+
|
|
|
+那么会有这么几个问题?
|
|
|
+
|
|
|
+1. 如何自动绘制可行走区域
|
|
|
+2. 如何区域划分凸多边形
|
|
|
+3. 如何进行路径查询
|
|
|
+
|
|
|
+**区域划分凸多边形**
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+如果区域是凸多边形,则直接结束算法
|
|
|
+
|
|
|
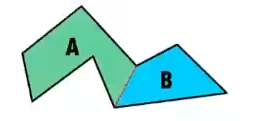
+如果区域不是凸多边形,则找到一个凹的角(>180°),尝试将其与多边形内部其他的点连接起来,这个时候会得到两个新的区域,也就是上图的 A 和 B,然后对这两个区域再进行相同的算法,如此一来整个场景就都是凸多边形
|
|
|
+
|
|
|
+- 如何判断一个多边形是凸多边形
|
|
|
+
|
|
|
+检查是否存在大于 180° 的角
|

 liucong5
liucong5
{kind=link}