|
|
@@ -226,7 +226,9 @@ bool isCross(Vector2D a, Vector2D b, Vector2D c, Vector2D d) {
|
|
|
|
|
|
体素化约占 `Recast Navigation Build`耗时的 80%~90%
|
|
|
|
|
|
-对于 3D 场景来说,角色需要在一个碰撞体上移动,所以首先需要获得 `Collision` 数据
|
|
|
+#### UE 获取 Collision
|
|
|
+
|
|
|
+对于 3D 场景来说,角色就是在一个碰撞体上移动,所以要获得可行走区域首先需要获得 `Collision` 数据
|
|
|
|
|
|
在 Unreal 游戏引擎中,最后都是调用 `FRecastNavMeshGenerator::ExportRigidBodyGeometry()` 接口,可能不同的版本可能会使用不同的物理引擎(比如 Chaos 和 PhysX),但是最后都是调用这个统一接口
|
|
|
|
|
|
@@ -353,10 +355,130 @@ void FNavigationDataHandler::ProcessPendingOctreeUpdates()
|
|
|
|
|
|
因为一次更新 `NavOctree` 的性能消耗是很大的,所以收集一次信息后统一更新。可以将多个更新请求进行合并和优化,避免频繁地修改 NavOctree 的结构,从而提高性能和稳定性
|
|
|
|
|
|
-在 `AddNode` 的时候才真正收集碰撞体数据
|
|
|
+在 `AddNode` 的时候才真正收集碰撞体数据到 `NavOctree` 中
|
|
|
|
|
|
```cpp
|
|
|
OctreeController.NavOctree->AddNode(ElementOwner, DirtyElement.NavInterface, ElementBounds, GeneratedData);
|
|
|
|
|
|
OctreeController.NavOctree->AppendToNode(*ElementId, DirtyElement.NavInterface, ElementBounds, GeneratedData);
|
|
|
```
|
|
|
+
|
|
|
+#### 体素化
|
|
|
+
|
|
|
+相关功能在 `Engine\Source\Runtime\Navmesh\Private\Recast\RecastRasterization.cpp` 文件中
|
|
|
+
|
|
|
+把世界理解成一个 Minecraft 的世界,整个世界都是由一个一个方块组成的
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
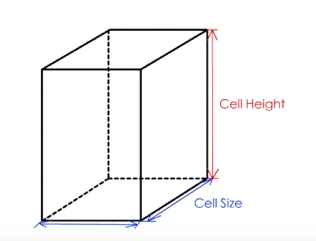
+每个体素由长方体构成,水平面上为正方形
|
|
|
+
|
|
|
+至于为什么不是正方体,是因为对于大多数用于行走的 NevMesh 来说对于高度的精度要求没有水平面那么高,所以很多时候 `Cell Height` 会比 `Cell Size` 大很多
|
|
|
+
|
|
|
+体素化实现过程
|
|
|
+
|
|
|
+1. 遍历所有偶碰撞器每个三角面
|
|
|
+2. 沿水平面垂直(y轴)切分 (以 `Cell Size` 切分)
|
|
|
+3. 沿水平面水平(x轴)七分 (以 `Cell Size` 切分)
|
|
|
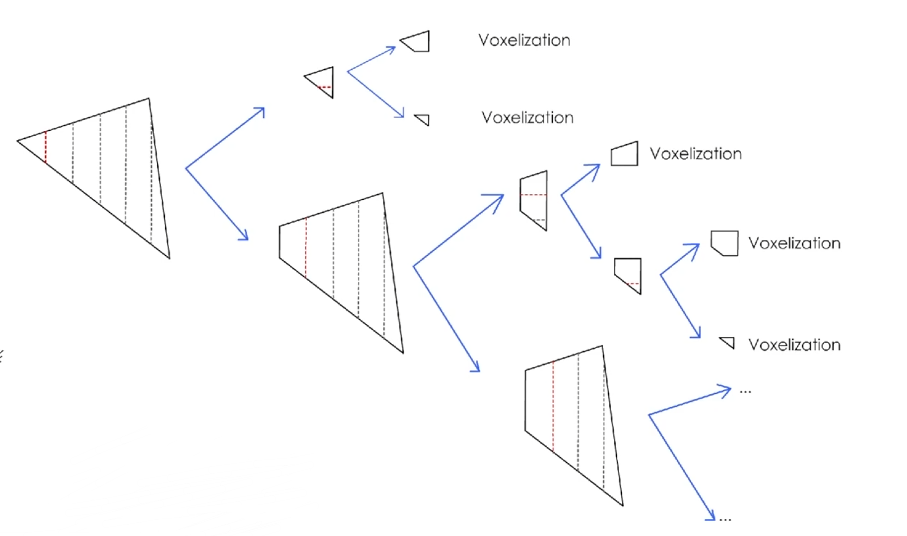
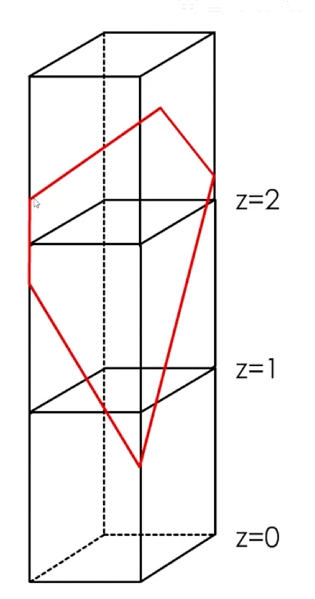
+4. 将切分下来的多边形体素化(水平面切分后能保证在一个 Cell 里,这时根据多边形 z 值最大最小值,覆盖所有经过的体素)
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+上图为俯视角查看 `Collision` 的一个三角面,首先将三角面沿 y 轴切分,然后沿着 x 轴切分
|
|
|
+
|
|
|
+最后得到多个小块,根据小块上点的 z 轴的最大值和最小值和 `Cell Height` 可以计算出该占据的体素
|
|
|
+
|
|
|
+对应的代码如下
|
|
|
+
|
|
|
+```cpp
|
|
|
+/// @par
|
|
|
+///
|
|
|
+/// No spans will be added if the triangle does not overlap the heightfield grid.
|
|
|
+///
|
|
|
+/// @see rcHeightfield
|
|
|
+void rcRasterizeTriangle(rcContext* ctx, const rcReal* v0, const rcReal* v1, const rcReal* v2,
|
|
|
+ const unsigned char area, rcHeightfield& solid,
|
|
|
+ const int flagMergeThr, const int rasterizationFlags, const int* rasterizationMasks) //UE
|
|
|
+{
|
|
|
+ rcAssert(ctx);
|
|
|
+
|
|
|
+ ctx->startTimer(RC_TIMER_RASTERIZE_TRIANGLES);
|
|
|
+
|
|
|
+ const rcReal ics = 1.0f/solid.cs;
|
|
|
+ const rcReal ich = 1.0f/solid.ch;
|
|
|
+ rasterizeTri(v0, v1, v2, area, solid, solid.bmin, solid.bmax, solid.cs, ics, ich, flagMergeThr, rasterizationFlags, rasterizationMasks); //UE
|
|
|
+
|
|
|
+ ctx->stopTimer(RC_TIMER_RASTERIZE_TRIANGLES);
|
|
|
+}
|
|
|
+```
|
|
|
+
|
|
|
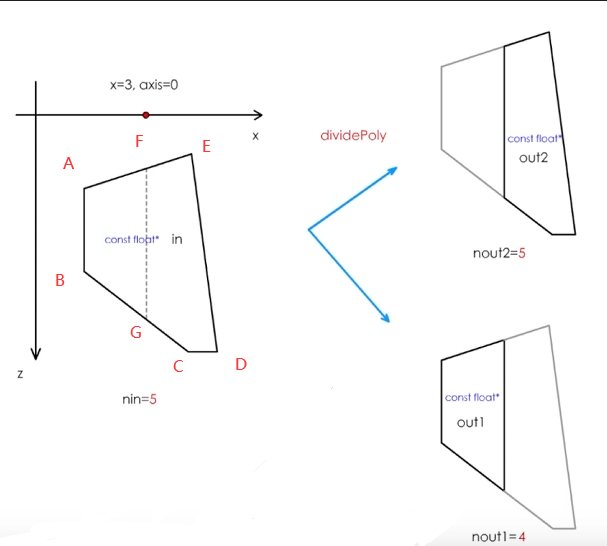
+**切割多边形算法**函数为 `static int clipPoly`,旧版本是 `static void dividePoly`
|
|
|
+
|
|
|
+算法的核心思路是**逆时针**遍历节点
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+对于 AE 来说,点 A 和点 E 在轴两边,所以 A 加入左边多边形,E 加入右边多边形,根据轴的坐标线性插值计算出 F 的坐标,同时加入左右两个多边形
|
|
|
+
|
|
|
+对于 AB 来说,点 A 和点 B 在轴的左边,所以两个点都加入左边多边形
|
|
|
+
|
|
|
+对于 BC 来说,点 B 和点 C 在轴两边,所以 B 加入左边多边形,C 加入右边多边形,根据轴的坐标线性插值计算出 G 的坐标,同时加入左右两个多边形
|
|
|
+
|
|
|
+```cpp
|
|
|
+static int clipPoly(const rcReal* in, int n, rcReal* out, rcReal pnx, rcReal pnz, rcReal pd)
|
|
|
+{
|
|
|
+ rcReal d[12];
|
|
|
+ for (int i = 0; i < n; ++i)
|
|
|
+ d[i] = pnx*in[i*3+0] + pnz*in[i*3+2] + pd;
|
|
|
+
|
|
|
+ int m = 0;
|
|
|
+ for (int i = 0, j = n-1; i < n; j=i, ++i)
|
|
|
+ {
|
|
|
+ bool ina = d[j] >= 0;
|
|
|
+ bool inb = d[i] >= 0;
|
|
|
+ if (ina != inb)
|
|
|
+ {
|
|
|
+ rcReal s = d[j] / (d[j] - d[i]);
|
|
|
+ out[m*3+0] = in[j*3+0] + (in[i*3+0] - in[j*3+0])*s;
|
|
|
+ out[m*3+1] = in[j*3+1] + (in[i*3+1] - in[j*3+1])*s;
|
|
|
+ out[m*3+2] = in[j*3+2] + (in[i*3+2] - in[j*3+2])*s;
|
|
|
+ m++;
|
|
|
+ }
|
|
|
+ if (inb)
|
|
|
+ {
|
|
|
+ out[m*3+0] = in[i*3+0];
|
|
|
+ out[m*3+1] = in[i*3+1];
|
|
|
+ out[m*3+2] = in[i*3+2];
|
|
|
+ m++;
|
|
|
+ }
|
|
|
+ }
|
|
|
+ return m;
|
|
|
+}
|
|
|
+```
|
|
|
+
|
|
|
+最后将多边形所接触到的区域全部标记为占有,如下图所示
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+#### 体素化表达
|
|
|
+
|
|
|
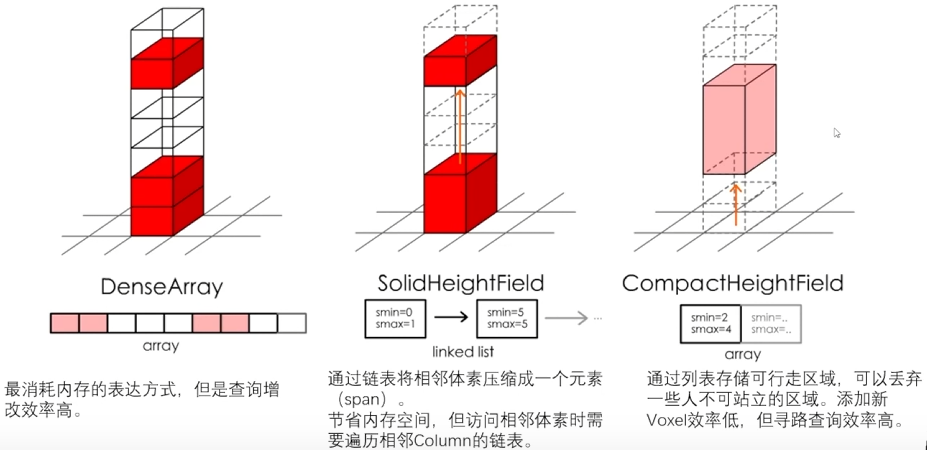
+`aaabbbbccc` 可以表达为 `3a4b3c`,在运行时再解压缩成真正的字符串,这种方法被称为 `Run-length encoding`
|
|
|
+
|
|
|
+同理,对于体素来说也可以这么做
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+如果直接使用数组存储体素是比较占用内存的,所以可以先将相邻的体素压缩成一个 `span`,这个时候存储的是被占用的体素,可以将 `SolidHeightField` 转换成存储不被占用的体素,即 `CompactHeightField`
|
|
|
+
|
|
|
+一般来说 `CompactHeightField` 存储的就是可行走区域,这种存储结构可以让寻路效率增加,但是如果增减体素则效率低
|
|
|
+
|
|
|
+> 设定人体需要占用两个 `Cell Height`,所以最上面的体素是不能站人的,因此在 `CompactHeightField` 中被**剔除**
|
|
|
+
|
|
|
+上面三种数据结构 `DenseArray`、`SolidHeightField` 和 `CompactHeightField` 在不同情况各有优势
|
|
|
+
|
|
|
+- `DenseArray` 访问修改体素状态快、查询寻路慢、内存占用高
|
|
|
+- `SolidHeightField` 内存占用小、访问修改体素状态速度中、查询寻路速度中
|
|
|
+- `CompactHeightField` 内存占用小、访问修改体素修改速度慢、查询寻路速度快
|
|
|
+
|
|
|
+在不同的应用情况,可以考虑使用不同的数据结构存储体素信息
|
|
|
+
|

 nicetry12138
nicetry12138
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}