|
|
@@ -1,7 +1,7 @@
|
|
|
<!--
|
|
|
* @Author: your name
|
|
|
* @Date: 2021-10-01 11:33:27
|
|
|
- * @LastEditTime: 2022-02-19 17:04:58
|
|
|
+ * @LastEditTime: 2022-02-19 20:08:55
|
|
|
* @LastEditors: Please set LastEditors
|
|
|
* @Description: In User Settings Edit
|
|
|
* @FilePath: D:\MarkdownLog\图形学.md
|
|
|
@@ -25,11 +25,11 @@
|
|
|
|
|
|
### 点乘
|
|
|
|
|
|
-```math
|
|
|
+$$
|
|
|
\vec{A} = (^{x} _{y}) \\
|
|
|
\vec{A}^T = (x, y) \\
|
|
|
\lVert \vec{A} = \sqrt{x ^2 + y^2} \rVert \\
|
|
|
-```
|
|
|
+$$
|
|
|
|
|
|
向量之间的点乘
|
|
|
|
|
|
@@ -169,34 +169,34 @@ $$
|
|
|
|
|
|
将单位向量按y轴对称的操作:
|
|
|
$$
|
|
|
-\begin{pmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
-1 & 0 \\
|
|
|
0 & 1
|
|
|
-\end{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
*
|
|
|
-\begin{pmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
x\\
|
|
|
y
|
|
|
-\end{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
=
|
|
|
-\begin{pmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
-x \\
|
|
|
y
|
|
|
-\end{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
$$
|
|
|
|
|
|
矩阵的转置:行和列互换
|
|
|
|
|
|
$$
|
|
|
-\begin{pmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
1 & 2 \\
|
|
|
3 & 4 \\
|
|
|
5 & 6
|
|
|
-\end{pmatrix} ^T =
|
|
|
-\begin{pmatrix}
|
|
|
+\end{bmatrix} ^T =
|
|
|
+\begin{bmatrix}
|
|
|
1 & 3 & 5 \\
|
|
|
2 & 4 & 6
|
|
|
-\end{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
\\
|
|
|
(AB)^T = B^T * A^T
|
|
|
$$
|
|
|
@@ -205,11 +205,11 @@ $$
|
|
|
|
|
|
$$
|
|
|
I_{3\times3} =
|
|
|
-\begin{pmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
1 & 0 & 0 \\
|
|
|
0 & 1 & 0 \\
|
|
|
0 & 0 & 1
|
|
|
-\end{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
$$
|
|
|
|
|
|
矩阵的逆:矩阵A乘矩阵B得到单位矩阵,则成B是A的逆,写作$A^{-1}$
|
|
|
@@ -220,12 +220,12 @@ $AA^{-1} = I$、$(AB)^{-1} = B^{-1} * A^{-1}$
|
|
|
|
|
|
$$
|
|
|
\vec{a} \cdot \vec{b} = \vec{a}^T\vec{b}=
|
|
|
-\begin{pmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
x_a & y_a & z_a
|
|
|
-\end{pmatrix}
|
|
|
-\begin{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
x_b \\ y_b \\ z_b
|
|
|
-\end{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
= \left( x_a*x_b + y_a*y_b + z_a*z_b \right)
|
|
|
$$
|
|
|
|
|
|
@@ -233,20 +233,318 @@ $$
|
|
|
|
|
|
$$
|
|
|
\vec{a} \times \vec{b} = A^*\vec{b} =
|
|
|
-\begin{pmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
0 & -z_a & y_a \\
|
|
|
z_a & 0 & -x_a \\
|
|
|
-y_a & x_a & 0
|
|
|
-\end{pmatrix}
|
|
|
-\begin{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
x_b \\ y_b \\ z_b
|
|
|
-\end{pmatrix}
|
|
|
+\end{bmatrix}
|
|
|
$$
|
|
|
|
|
|
> $A^*$是$\vec{a}$的dual matrix
|
|
|
|
|
|
## 变换
|
|
|
|
|
|
+### 仿射变换
|
|
|
+
|
|
|
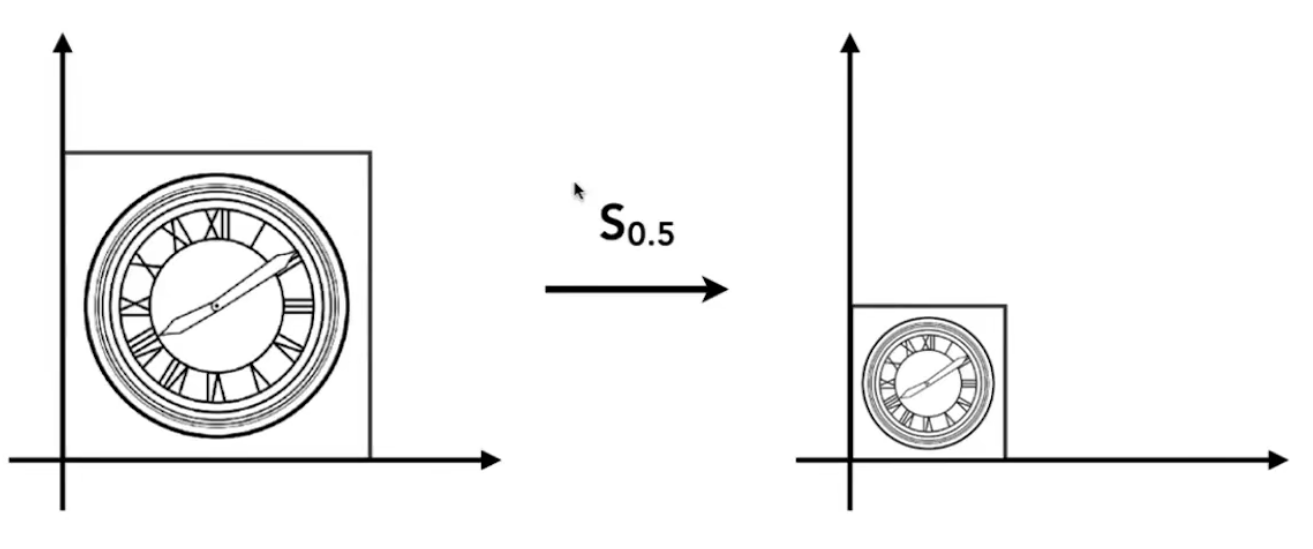
+#### 伸缩变换(Scale)
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+$$
|
|
|
+x^` = sx\\
|
|
|
+y^` = sy\\
|
|
|
+\Rightarrow \\
|
|
|
+\begin{bmatrix}
|
|
|
+ x^` \\ y^`
|
|
|
+\end{bmatrix}
|
|
|
+=
|
|
|
+\begin{bmatrix}
|
|
|
+ s & 0 \\
|
|
|
+ 0 & s
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ x \\ y
|
|
|
+\end{bmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+### 镜像
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+$$
|
|
|
+x^` = -x\\
|
|
|
+y^` = y\\
|
|
|
+\Rightarrow \\
|
|
|
+\begin{bmatrix}
|
|
|
+ x^` \\ y^`
|
|
|
+\end{bmatrix}
|
|
|
+=
|
|
|
+\begin{bmatrix}
|
|
|
+ -1 & 0 \\
|
|
|
+ 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ x \\ y
|
|
|
+\end{bmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
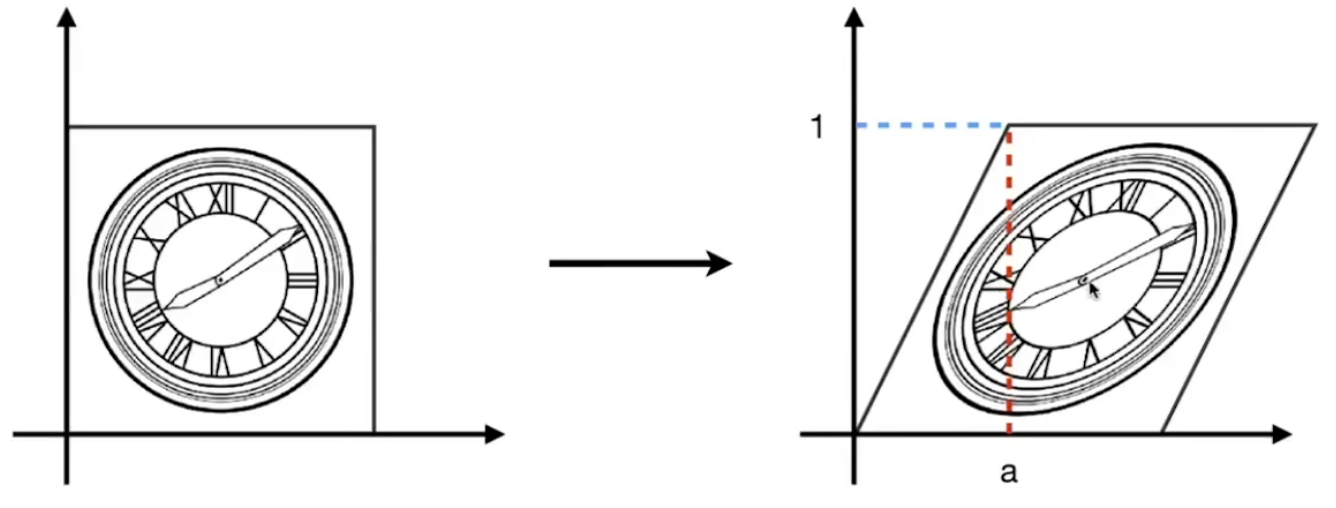
+#### 切变
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+$$
|
|
|
+x^` = x + a*y\\
|
|
|
+y^` = y\\
|
|
|
+\Rightarrow \\
|
|
|
+\begin{bmatrix}
|
|
|
+ x^` \\ y^`
|
|
|
+\end{bmatrix}
|
|
|
+=
|
|
|
+\begin{bmatrix}
|
|
|
+ 1 & a \\
|
|
|
+ 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ x \\ y
|
|
|
+\end{bmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+#### 旋转(Rotate)
|
|
|
+
|
|
|
+**默认绕原点逆时针旋转**
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+公式推导
|
|
|
+- 右下角点坐标(1, 0)=>($\cos\Theta, \sin\Theta$)
|
|
|
+- 左上角点坐标(0, 1)=>($-\sin\Theta, \cos\Theta$)
|
|
|
+
|
|
|
+$$
|
|
|
+\left(x^`, y^`\right)
|
|
|
+\Longrightarrow
|
|
|
+\begin{bmatrix}
|
|
|
+ A & B \\
|
|
|
+ C & D
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ x \\ y
|
|
|
+\end{bmatrix}\\
|
|
|
+带入x=1, y=0, x^`=\cos\Theta, y^`=\sin\Theta\\
|
|
|
+得: A = \cos\Theta , C = \sin\Theta\\
|
|
|
+带入x=0, y=1, x^`=-\sin\Theta, y^`=\cos\Theta\\
|
|
|
+得: B = -\sin\Theta, D = \cos\Theta
|
|
|
+$$
|
|
|
+
|
|
|
+#### 平移(Transiation)
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+- $x^` = x + t_x$
|
|
|
+- $y^` = y + t_y$
|
|
|
+
|
|
|
+$$
|
|
|
+\begin{bmatrix}
|
|
|
+ x^` \\ y ^ `
|
|
|
+\end{bmatrix}
|
|
|
+=
|
|
|
+\begin{bmatrix}
|
|
|
+ 1 & 0 \\
|
|
|
+ 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ x \\ y
|
|
|
+\end{bmatrix}
|
|
|
++
|
|
|
+\begin{bmatrix}
|
|
|
+ t_x \\ t_y
|
|
|
+\end{bmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+很明显,这个**平移**的坐标无法通过一个矩阵就表示出来,这个时候就需要引入**齐次矩阵**
|
|
|
+
|
|
|
+> **齐次矩阵**就是将一个原本是n维的向量用一个n+1维向量来表示
|
|
|
+
|
|
|
+$$
|
|
|
+\begin{bmatrix}
|
|
|
+ x^` \\ y ^ ` \\ 1
|
|
|
+\end{bmatrix}
|
|
|
+=
|
|
|
+\begin{bmatrix}
|
|
|
+ 1 & 0 & t_x \\
|
|
|
+ 0 & 1 & t_y \\
|
|
|
+ 0 & 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ x \\ y \\ 1
|
|
|
+\end{bmatrix}
|
|
|
+=
|
|
|
+\begin{bmatrix}
|
|
|
+ x + t_x \\ y + t_y \\ 1
|
|
|
+\end{bmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+通过齐次坐标矩阵就可以使用一个矩阵来表示线性变换,**为了保证变换矩阵的一致性**,所以上面讲的**所有矩阵都需要转换成齐次矩阵**
|
|
|
+
|
|
|
+在其次坐标中,点使用$\begin{pmatrix}
|
|
|
+ x \\ y \\ 1
|
|
|
+\end{pmatrix}$
|
|
|
+来表示,向量使用$\begin{pmatrix}
|
|
|
+ x \\ y \\ 0
|
|
|
+\end{pmatrix}$
|
|
|
+来表示
|
|
|
+
|
|
|
+- 向量 + 向量 = 向量
|
|
|
+- point - point = 向量
|
|
|
+- point + vector = point
|
|
|
+- point + point = 两点的中点
|
|
|
+
|
|
|
+为什么point + point的结果是两个点的中点
|
|
|
+
|
|
|
+$$
|
|
|
+A = \begin{pmatrix}
|
|
|
+ x \\ y \\ w
|
|
|
+\end{pmatrix}
|
|
|
+=
|
|
|
+\begin{pmatrix}
|
|
|
+ x / w \\ y / w \\ 1
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+B = \begin{pmatrix}
|
|
|
+ a \\ b \\ c
|
|
|
+\end{pmatrix}
|
|
|
+=
|
|
|
+\begin{pmatrix}
|
|
|
+ a / c \\ b / c \\ 1
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+A + B =
|
|
|
+\begin{pmatrix}
|
|
|
+ x/w + a/c \\ y/w + b/c \\ 2
|
|
|
+\end{pmatrix}
|
|
|
+=
|
|
|
+\begin{pmatrix}
|
|
|
+ \frac{x}{2w} + \frac{a}{2c} \\
|
|
|
+ \frac{y}{2w} + \frac{b}{2c} \\
|
|
|
+ 1
|
|
|
+\end{pmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+#### 总和
|
|
|
+
|
|
|
+$$
|
|
|
+Scale \Longrightarrow
|
|
|
+S(s_x, s_y) =
|
|
|
+\begin{pmatrix}
|
|
|
+ s_x & 0 & 0 \\
|
|
|
+ 0 & s_y & 0 \\
|
|
|
+ 0 & 0 & 1
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+Rotation \Longrightarrow
|
|
|
+R(\Theta) =
|
|
|
+\begin{pmatrix}
|
|
|
+ \cos\Theta & -\sin\Theta & 0 \\
|
|
|
+ \sin\Theta & \cos\Theta & 0 \\
|
|
|
+ 0 & 0 & 1
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+Translation \Longrightarrow
|
|
|
+T(t_x, t_y) =
|
|
|
+\begin{pmatrix}
|
|
|
+ 1 & 0 & t_x \\
|
|
|
+ 0 & 1 & t_y \\
|
|
|
+ 0 & 0 & 1
|
|
|
+\end{pmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+### 组合变换
|
|
|
+
|
|
|
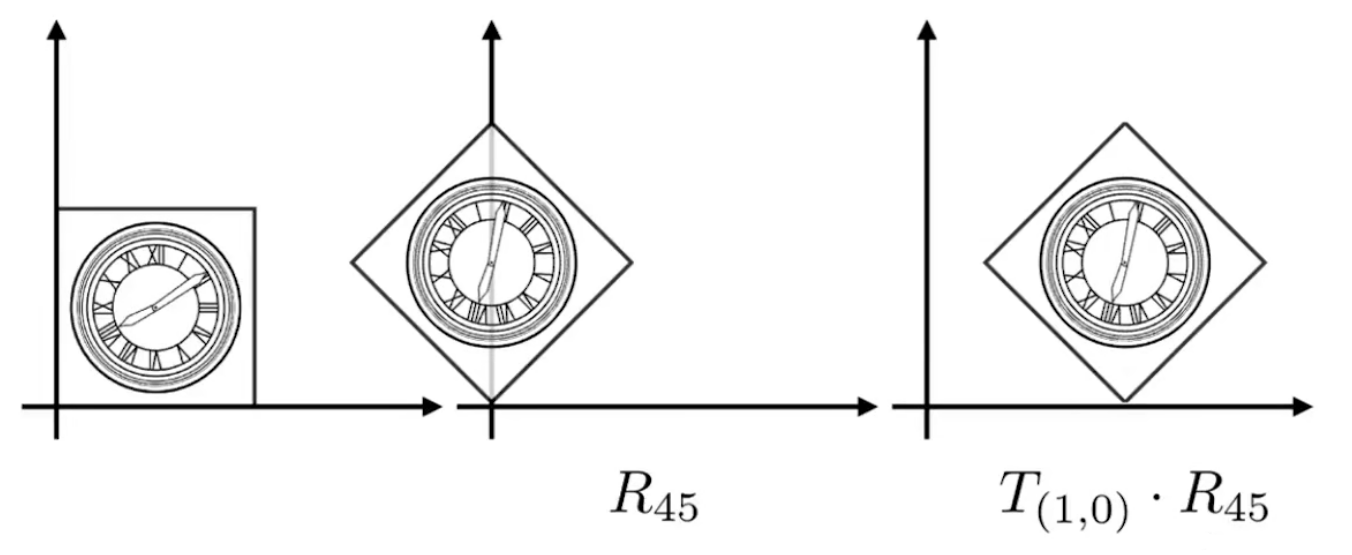
+- 图1
|
|
|
+
|
|
|
+
|
|
|
+- 图2
|
|
|
+
|
|
|
+
|
|
|
+> 旋转默认绕原点,逆时针旋转
|
|
|
+
|
|
|
+比较上述两张图片,可以发现先旋转再平移 与 先平移再旋转 得到的结果是不同的,对应的理解就是**矩阵的乘法**,矩阵乘法不满足交换律
|
|
|
+
|
|
|
+为了得到图1的效果,我们需要先旋转45°,再向X轴正方向平移1一个单位
|
|
|
+
|
|
|
+$$
|
|
|
+T_{(1, 0)} \cdot R_{45} \cdot \begin{bmatrix}
|
|
|
+ x \\ y \\ 1
|
|
|
+\end{bmatrix}
|
|
|
+=
|
|
|
+\begin{bmatrix}
|
|
|
+ 1 & 0 & 1 \\
|
|
|
+ 0 & 1 & 0 \\
|
|
|
+ 0 & 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ \cos45° & -\sin45° & 0 \\
|
|
|
+ \sin45° & \cos45° & 0 \\
|
|
|
+ 0 & 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ x \\ y \\ 1
|
|
|
+\end{bmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+前面提过向量一般放在矩阵乘法的最右边,并且根据矩阵具有结合律,上述式子可以理解为先计算$R_{45}$与$\begin{bmatrix}x\\y\\1\end{bmatrix}$,再计算与$T_{(1, 0)}$的乘法
|
|
|
+
|
|
|
+但是,根据矩阵的结合律,我们可以先把前面的矩阵的计算结果得出最终变换矩阵,最后与向量相乘
|
|
|
+
|
|
|
+$$
|
|
|
+A_n(...A_2(A_1(X)) =
|
|
|
+\underbrace{A_n...A_2 \cdot A_1}_{先计算} \cdot \begin{pmatrix}
|
|
|
+ x \\ y \\ 1
|
|
|
+\end{pmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+### 变换的分解
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+如果想让图片围绕左下角旋转,而不是原点选择,可以采用的解法是
|
|
|
+
|
|
|
+左下角移动到原点 => 绕原点旋转 => 左下角移动到起始位置
|
|
|
+
|
|
|
+### 三位空间的变换
|
|
|
+
|
|
|
+point : $\begin{pmatrix}
|
|
|
+ x \\ y \\ z \\ 1
|
|
|
+\end{pmatrix}$
|
|
|
+vector : $\begin{pmatrix}
|
|
|
+ x \\ y \\ z \\ 0
|
|
|
+\end{pmatrix}$
|
|
|
+
|
|
|
+$$
|
|
|
+
|
|
|
+\begin{pmatrix}
|
|
|
+ x^` \\ y^1 \\ z^` \\ 1
|
|
|
+\end{pmatrix}
|
|
|
+=
|
|
|
+\begin{pmatrix}
|
|
|
+ a & b & c & t_x \\
|
|
|
+ d & e & f & t_y \\
|
|
|
+ g & h & i & t_z \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{pmatrix}
|
|
|
+\begin{pmatrix}
|
|
|
+ x \\ y \\ z \\ 1
|
|
|
+\end{pmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+### 逆变换
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+逆变换就是把之前的操作反向来一次,对应的就是矩阵中的逆矩阵
|
|
|
+
|
|
|
|
|
|
|
|
|
# 光栅化
|


{kind=link}
{kind=link}

{kind=link}

{kind=link}
{kind=link}

{kind=link}
{kind=link}

{kind=link}

{kind=link}
