|
|
@@ -1,13 +1,14 @@
|
|
|
<!--
|
|
|
* @Author: your name
|
|
|
* @Date: 2021-10-01 11:33:27
|
|
|
- * @LastEditTime: 2022-02-19 20:16:03
|
|
|
+ * @LastEditTime: 2022-02-20 18:56:59
|
|
|
* @LastEditors: Please set LastEditors
|
|
|
* @Description: In User Settings Edit
|
|
|
* @FilePath: D:\MarkdownLog\图形学.md
|
|
|
--->
|
|
|
|
|
|
-<script type="text/javascript" src="http://cdn.mathjax.org/mathjax/latest/MathJax.js?config=default"></script>
|
|
|
+https://latex.codecogs.com/svg.latex?\vec{A}=(^{x}_{y})\\\vec{A}^T=(x,y)\\\lVert\vec{A}=\sqrt{x^2+y^2}\rVert\
|
|
|
+
|
|
|
+-->
|
|
|
|
|
|
为什么要学习计算机图形学?——计算机图形学就是厉害
|
|
|
|
|
|
@@ -129,8 +130,7 @@ k *
|
|
|
x & a \\
|
|
|
y & b \\
|
|
|
z & c \\
|
|
|
-\end{pmatrix}
|
|
|
- =
|
|
|
+\end{pmatrix} =
|
|
|
\begin{pmatrix}
|
|
|
k*x & k*a \\
|
|
|
k*y & k*b \\
|
|
|
@@ -149,13 +149,11 @@ $$
|
|
|
x_1 & a_1 \\
|
|
|
y_1 & b_1 \\
|
|
|
z_1 & c_1 \\
|
|
|
-\end{pmatrix}
|
|
|
-*
|
|
|
+\end{pmatrix}*
|
|
|
\begin{pmatrix}
|
|
|
x_2 & a_2 & q_2 & e_2 \\
|
|
|
y_2 & b_2 & w_2 & r_2 \\
|
|
|
-\end{pmatrix}
|
|
|
-=
|
|
|
+\end{pmatrix}=
|
|
|
\begin{pmatrix}
|
|
|
x_1 * x_2 + a_1 * y_2 & x_1 * a_2 + a_1 * b_2 & x_1 * q_2 + a_1 * w_2 & x_1 * e_2 + a_1 * r_2 \\
|
|
|
y_1 * x_2 + b_1 * y_2 & y_1 * a_2 + b_1 * b_2 & y_1 * q_2 + b_1 * w_2 & y_1 * e_2 + b_1 * r_2 +\\
|
|
|
@@ -175,13 +173,11 @@ $$
|
|
|
\begin{bmatrix}
|
|
|
-1 & 0 \\
|
|
|
0 & 1
|
|
|
-\end{bmatrix}
|
|
|
-*
|
|
|
+\end{bmatrix} *
|
|
|
\begin{bmatrix}
|
|
|
x\\
|
|
|
y
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
-x \\
|
|
|
y
|
|
|
@@ -228,8 +224,7 @@ $$
|
|
|
\end{bmatrix}
|
|
|
\begin{bmatrix}
|
|
|
x_b \\ y_b \\ z_b
|
|
|
-\end{bmatrix}
|
|
|
-= \left( x_a*x_b + y_a*y_b + z_a*z_b \right)
|
|
|
+\end{bmatrix}= \left( x_a*x_b + y_a*y_b + z_a*z_b \right)
|
|
|
$$
|
|
|
|
|
|
向量的叉乘转成矩阵运算
|
|
|
@@ -262,8 +257,7 @@ y^` = sy\\
|
|
|
\Rightarrow \\
|
|
|
\begin{bmatrix}
|
|
|
x^` \\ y^`
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
s & 0 \\
|
|
|
0 & s
|
|
|
@@ -283,8 +277,7 @@ y^` = y\\
|
|
|
\Rightarrow \\
|
|
|
\begin{bmatrix}
|
|
|
x^` \\ y^`
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
-1 & 0 \\
|
|
|
0 & 1
|
|
|
@@ -304,8 +297,7 @@ y^` = y\\
|
|
|
\Rightarrow \\
|
|
|
\begin{bmatrix}
|
|
|
x^` \\ y^`
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
1 & a \\
|
|
|
0 & 1
|
|
|
@@ -351,16 +343,14 @@ $$
|
|
|
$$
|
|
|
\begin{bmatrix}
|
|
|
x^` \\ y ^ `
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
1 & 0 \\
|
|
|
0 & 1
|
|
|
\end{bmatrix}
|
|
|
\begin{bmatrix}
|
|
|
x \\ y
|
|
|
-\end{bmatrix}
|
|
|
-+
|
|
|
+\end{bmatrix}+
|
|
|
\begin{bmatrix}
|
|
|
t_x \\ t_y
|
|
|
\end{bmatrix}
|
|
|
@@ -373,8 +363,7 @@ $$
|
|
|
$$
|
|
|
\begin{bmatrix}
|
|
|
x^` \\ y ^ ` \\ 1
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
1 & 0 & t_x \\
|
|
|
0 & 1 & t_y \\
|
|
|
@@ -382,8 +371,7 @@ $$
|
|
|
\end{bmatrix}
|
|
|
\begin{bmatrix}
|
|
|
x \\ y \\ 1
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
x + t_x \\ y + t_y \\ 1
|
|
|
\end{bmatrix}
|
|
|
@@ -409,16 +397,14 @@ $$
|
|
|
$$
|
|
|
A = \begin{pmatrix}
|
|
|
x \\ y \\ w
|
|
|
-\end{pmatrix}
|
|
|
-=
|
|
|
+\end{pmatrix}=
|
|
|
\begin{pmatrix}
|
|
|
x / w \\ y / w \\ 1
|
|
|
\end{pmatrix}
|
|
|
\\
|
|
|
B = \begin{pmatrix}
|
|
|
a \\ b \\ c
|
|
|
-\end{pmatrix}
|
|
|
-=
|
|
|
+\end{pmatrix}=
|
|
|
\begin{pmatrix}
|
|
|
a / c \\ b / c \\ 1
|
|
|
\end{pmatrix}
|
|
|
@@ -426,8 +412,7 @@ B = \begin{pmatrix}
|
|
|
A + B =
|
|
|
\begin{pmatrix}
|
|
|
x/w + a/c \\ y/w + b/c \\ 2
|
|
|
-\end{pmatrix}
|
|
|
-=
|
|
|
+\end{pmatrix}=
|
|
|
\begin{pmatrix}
|
|
|
\frac{x}{2w} + \frac{a}{2c} \\
|
|
|
\frac{y}{2w} + \frac{b}{2c} \\
|
|
|
@@ -463,6 +448,14 @@ T(t_x, t_y) =
|
|
|
\end{pmatrix}
|
|
|
$$
|
|
|
|
|
|
+### 逆变换
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+逆变换就是把之前的操作反向来一次,对应的就是矩阵中的逆矩阵
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
### 组合变换
|
|
|
|
|
|
- 图1
|
|
|
@@ -480,8 +473,7 @@ $$
|
|
|
$$
|
|
|
T_{(1, 0)} \cdot R_{45} \cdot \begin{bmatrix}
|
|
|
x \\ y \\ 1
|
|
|
-\end{bmatrix}
|
|
|
-=
|
|
|
+\end{bmatrix}=
|
|
|
\begin{bmatrix}
|
|
|
1 & 0 & 1 \\
|
|
|
0 & 1 & 0 \\
|
|
|
@@ -518,19 +510,19 @@ $$
|
|
|
|
|
|
### 三位空间的变换
|
|
|
|
|
|
+三维与二维无非就是多了一个维度,其他的变换相似,原理相同
|
|
|
+
|
|
|
point : $\begin{pmatrix}
|
|
|
- x \\ y \\ z \\ 1
|
|
|
-\end{pmatrix}$
|
|
|
+ x & y & z & 1
|
|
|
+\end{pmatrix}^T$
|
|
|
vector : $\begin{pmatrix}
|
|
|
- x \\ y \\ z \\ 0
|
|
|
-\end{pmatrix}$
|
|
|
+ x & y & z & 0
|
|
|
+\end{pmatrix}^T$
|
|
|
|
|
|
$$
|
|
|
-
|
|
|
\begin{pmatrix}
|
|
|
x^` \\ y^1 \\ z^` \\ 1
|
|
|
-\end{pmatrix}
|
|
|
-=
|
|
|
+\end{pmatrix}=
|
|
|
\begin{pmatrix}
|
|
|
a & b & c & t_x \\
|
|
|
d & e & f & t_y \\
|
|
|
@@ -540,15 +532,315 @@ $$
|
|
|
\begin{pmatrix}
|
|
|
x \\ y \\ z \\ 1
|
|
|
\end{pmatrix}
|
|
|
+\\
|
|
|
+Scale \Longrightarrow
|
|
|
+S(s_x, s_y, s_z) =
|
|
|
+\begin{pmatrix}
|
|
|
+ s_x & 0 & 0 & 0 \\
|
|
|
+ 0 & s_y & 0 & 0 \\
|
|
|
+ 0 & 0 & s_z & 0 \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+Translation \Longrightarrow
|
|
|
+T(t_x, t_y, t_z) =
|
|
|
+\begin{pmatrix}
|
|
|
+ 1 & 0 & 0 & t_x \\
|
|
|
+ 0 & 1 & 0 & t_y \\
|
|
|
+ 0 & 0 & 1 & t_z \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+R_x(\Theta)=
|
|
|
+\begin{pmatrix}
|
|
|
+ 1 & 0 & 0 & 0 \\
|
|
|
+ 0 & \cos\Theta & -\sin\Theta & 0 \\
|
|
|
+ 0 & \sin\Theta & \cos\Theta & 0 \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{pmatrix}绕X轴旋转
|
|
|
+\\
|
|
|
+R_y(\Theta) =
|
|
|
+\begin{pmatrix}
|
|
|
+ \cos\Theta & 0 & \sin\Theta & 0 \\
|
|
|
+ 0 & 1 & 0 & 0 \\
|
|
|
+ -\sin\Theta & 0 & \cos\Theta & 0 \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{pmatrix}绕Y轴旋转
|
|
|
+\\
|
|
|
+R_z(\Theta) =
|
|
|
+\begin{pmatrix}
|
|
|
+ \cos\Theta & -\sin\Theta & 0 & 0 \\
|
|
|
+ \sin\Theta & \cos\Theta & 0 & 0 \\
|
|
|
+ 0 & 0 & 1 & 0 \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{pmatrix}绕Z轴旋转
|
|
|
+\\
|
|
|
+R_{xyz}(\alpha, \beta, \sigma) = R_x(\alpha)R_y(\beta)R_z(\sigma)
|
|
|
$$
|
|
|
|
|
|
-### 逆变换
|
|
|
+> 旋转时,绕哪个轴旋转,那个轴对应的坐标不变,所以x轴旋转的第一行第一列、y轴旋转的第二行第二列、z轴旋转的第三行第三列
|
|
|
|
|
|
-
|
|
|
+如何证明$R_{xyz}(\alpha, \beta, \sigma) = R_x(\alpha)R_y(\beta)R_z(\sigma)$成立,这个时候需要引入**罗德里格斯公式**
|
|
|
|
|
|
-逆变换就是把之前的操作反向来一次,对应的就是矩阵中的逆矩阵
|
|
|
|
|
|
+### 视图变换 Camera/View
|
|
|
+
|
|
|
+视图就类似使用设计相机拍照,视图就是镜头中的世界
|
|
|
+
|
|
|
+- 拍一张好照片需要
|
|
|
+ - 好的地方(Module),搭建场景
|
|
|
+ - 好的角度(view),视图变换
|
|
|
+ - 投影(三维空间投影到二维照片)
|
|
|
+
|
|
|
+综上,就是图形学渲染出效果的模型(Model)、视图(View)、投影(Projection)变换,简称MVP变换
|
|
|
+
|
|
|
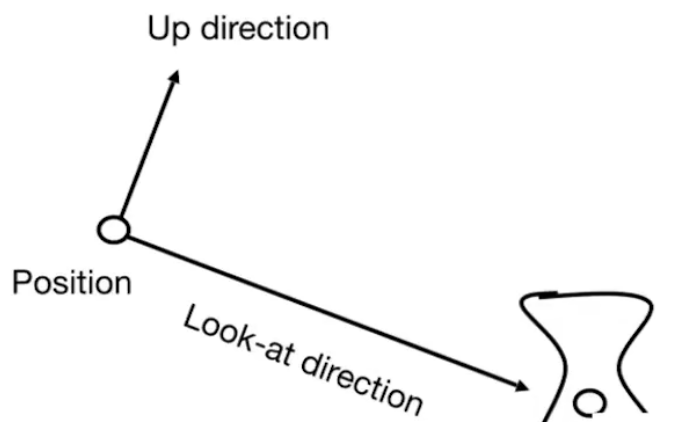
+- 定义相机
|
|
|
+ - 坐标
|
|
|
+ - 向上的向量(一个向量就可以确定相机的Roll)
|
|
|
+ - 朝向
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+**约定:相机永远在原点,永远不动,永远以y轴向上,永远看向-Z轴**
|
|
|
+其他物体也跟着相机移动
|
|
|
+
|
|
|
+- 针对坐标为(x, y, z),角度为(a, b, c)的相机,需要做哪些变换
|
|
|
+ 1. 相机移动到原点坐标
|
|
|
+ 2. 相机的朝向旋转到-Z轴方向
|
|
|
+ 3. 相机的向上向量旋转到Y轴方向
|
|
|
+
|
|
|
+设定相机的朝向向量为g,相机向上的向量为t,可推得相机另一个轴的向量为$g \times t$
|
|
|
+
|
|
|
+$$
|
|
|
+T_{view} =
|
|
|
+\begin{bmatrix}
|
|
|
+ 1 & 0 & 0 & -x_e \\
|
|
|
+ 0 & 1 & 0 & -y_e \\
|
|
|
+ 0 & 0 & 0 & -z_e
|
|
|
+\end{bmatrix} 坐标变换矩阵
|
|
|
+\\
|
|
|
+R^{-1}_{view} =
|
|
|
+\begin{bmatrix}
|
|
|
+ x_{g \times t} & x_t & x_{-g} & 0 \\
|
|
|
+ y_{g \times t} & y_t & y_{-g} & 0 \\
|
|
|
+ z_{g \times t} & z_t & z_{-g} & 0 \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{bmatrix} 不加证明给出矩阵R_{view}^{-1}
|
|
|
+\\
|
|
|
+R_{view}^{-1} *
|
|
|
+\begin{bmatrix}
|
|
|
+ 1 \\ 0 \\ 0
|
|
|
+\end{bmatrix} =
|
|
|
+\begin{bmatrix}
|
|
|
+ x_{g \times t} \\
|
|
|
+ y_{g \times t} \\
|
|
|
+ z_{g \times t} \\
|
|
|
+\end{bmatrix} 可见R_{view}^{-1}乘以X轴、Y轴、Z轴都等于相机对应的向量坐标
|
|
|
+\\
|
|
|
+R^{-1}_{view} * 标准矩阵 = 相机矩阵 \Longrightarrow 相机矩阵 * R_{view} = 标准矩阵
|
|
|
+\\
|
|
|
+R_{view}^{-1}是R_{view}的逆矩阵
|
|
|
+\\
|
|
|
+R_{view} =
|
|
|
+\begin{bmatrix}
|
|
|
+ x_{g \times t} & y_{g \times t} &z_{g \times t} & 0 \\
|
|
|
+ x_t & y_t & z_t & 0 \\
|
|
|
+ x_{-g} & y_{-g} & z_{-g} & 0 \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{bmatrix} 不加证明给出矩阵R_{view}
|
|
|
+\\
|
|
|
+M_{view} = R_{view} T_{view} 组合后得出视图变换矩阵(从右往左的理解顺序,先平移、再旋转)
|
|
|
+$$
|
|
|
+
|
|
|
+相机和所有的物体都根据该模型移动到特定位置,此时相机肯定是在原点的、看向-Z轴,向上坐标为Y轴的,各个物体的相对位置不变
|
|
|
+
|
|
|
+模型(单独对模型的操作)-视图(对相机的操作并同步到模型上)变换
|
|
|
+
|
|
|
+### 投影变换
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
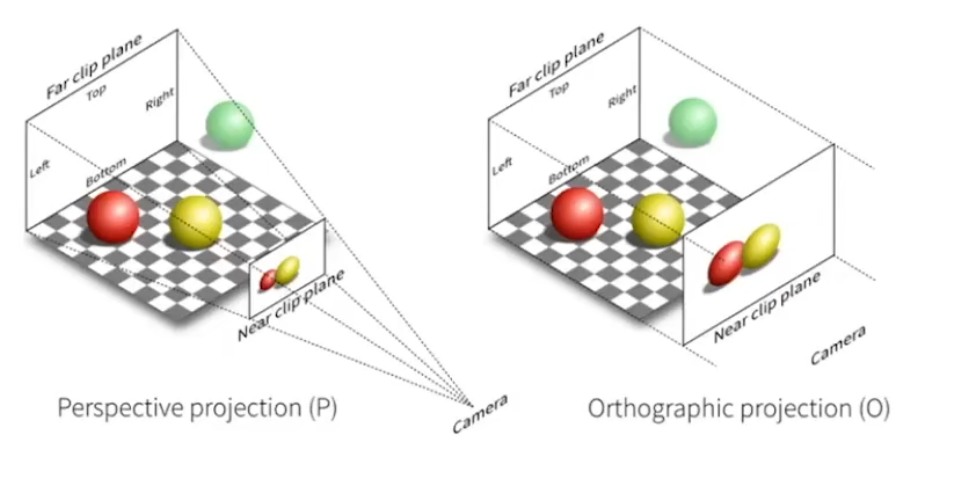
+> 图中左边为正交投影,右边是透视投影
|
|
|
+
|
|
|
+- 正交投影不会带来近大远小的世界效果,一般用于工程制图
|
|
|
+- 透视投影会有近大远小
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+> 图中左边为透视投影,右边为正交投影
|
|
|
+
|
|
|
+对于正交投影出来的图片结果,可以理解为相机在一个无限远的地方拍照,这样物体之间的距离差距就可以忽略不计了(走路月亮跟着你走的也是这个原因)
|
|
|
+
|
|
|
+#### 正交投影 Orthographic
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
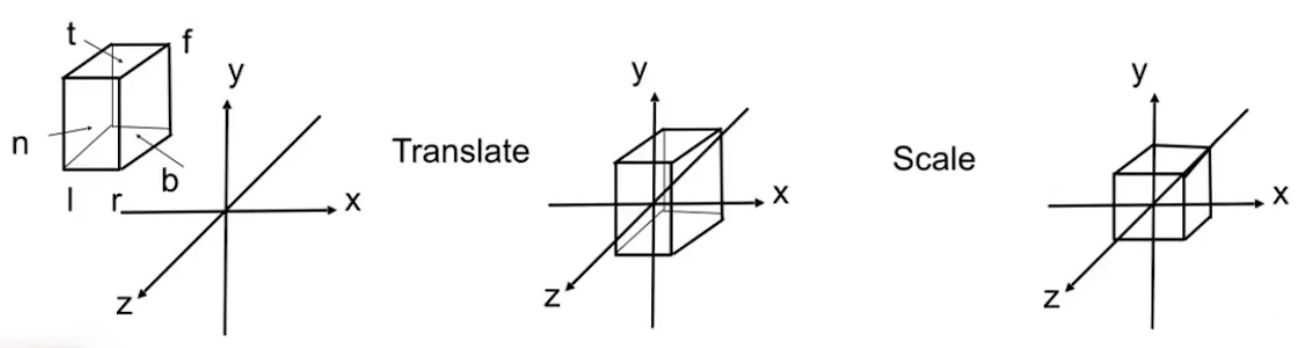
+- 在正交投影中定义一个矩阵,需要定义
|
|
|
+ - l(left)、r(right),左平面距离矩形中心的距离和右平面距离矩形中心的距离
|
|
|
+ - t(top)、b(bottom),上平面距离矩形中心的距离和下平面距离矩形中心的距离
|
|
|
+ - f(far)、r(near),远平面距离矩形中心的距离和近平面距离矩形中心的距离
|
|
|
+
|
|
|
+> 因为相机朝向是-Z轴,所以f值一般小于r值
|
|
|
+
|
|
|
+在定义完一个矩形之后,需要将其通过一系列变换转换成图片中最右边的标准立方体(canonical cub $[-1 ,1]^3$)
|
|
|
+
|
|
|
+- 一系列变换指的是
|
|
|
+ - 矩形移动到原点
|
|
|
+ - X、Y、Z轴拉伸成\[-1, 1\]
|
|
|
+
|
|
|
+$$
|
|
|
+M_{ortho} =
|
|
|
+\begin{bmatrix}
|
|
|
+ \frac{2}{r-l} & 0 & 0 & 0 \\
|
|
|
+ 0 & \frac{2}{t-b} & 0 & 0 \\
|
|
|
+ 0 & 0 & \frac{2}{n-f} & 0 \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+\begin{bmatrix}
|
|
|
+ 1 & 0 & 0 & -\frac{r+l}{2} \\
|
|
|
+ 0 & 1 & 0 & -\frac{t+b}{2} \\
|
|
|
+ 0 & 0 & 1 & -\frac{n+f}{2} \\
|
|
|
+ 0 & 0 & 0 & 1
|
|
|
+\end{bmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+> 左边缩放矩阵、右边平移矩阵(操作顺序从右往左理解)
|
|
|
+> 暂不考虑旋转
|
|
|
+
|
|
|
+这里对物体做了拉伸,未来还会做一次**视口变换**,**视口变换**时会再做一次拉伸
|
|
|
+
|
|
|
+#### 透视投影 Perspective
|
|
|
+
|
|
|
+理论上两条平行的先看起来相交了
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+前置知识:点(x, y, z, 1)乘以k,得到(kx, ky, kz, k != 0)表示其实也是点(x, y, z, 1),将k换成z,可以得到(xz, yz, $z^2$,z != 0),也表示(x, y, z, 1)这个点
|
|
|
+
|
|
|
+> (1, 0, 0, 1)与(2, 0, 0, 2)表示同一个点
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+- 透视投影分两步
|
|
|
+ 1. 将Frustum平截头体转换成Cuboid矩形
|
|
|
+ 2. 进行一次正交投影
|
|
|
+
|
|
|
+- 将Frustum平截头体转换成Cuboid矩形
|
|
|
+ - n(near)平面的四个点不会发生变换
|
|
|
+ - f(far)平面的z值不会发生变换,只是在平面内进行收缩
|
|
|
+ - n、f平面的中心点不会发生变化
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
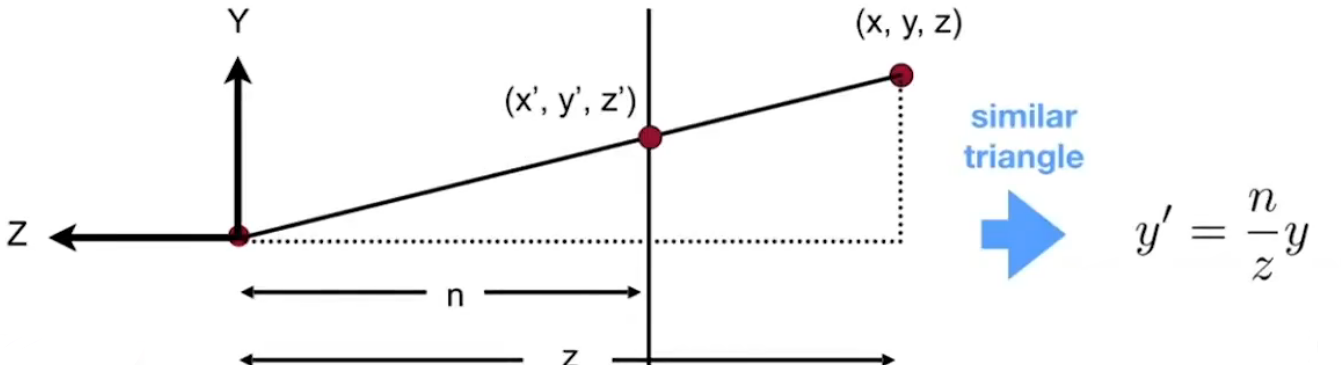
+通过侧面观察,更容易得到结论
|
|
|
+
|
|
|
+最左边的红点就是摄像机的位置,中间的红点就是n(near)平面,最右边的红点就是f(far)平面
|
|
|
+
|
|
|
+目标就是将(x, y, z) => (x, y\', z),通过相似三角形可以推出计算公式
|
|
|
+
|
|
|
+设$M_{persp}$为透视变换矩阵
|
|
|
+
|
|
|
+设$M^{(4\times4)}_{persp \rightarrow ortho}$为透视变换成正交的变换矩阵
|
|
|
+
|
|
|
+得出$M_{persp}=M_{ortho}M^{(4\times4)}_{persp \rightarrow ortho}$,即将模型先变换成正交可以用的矩形,再通过正交变换矩阵计算
|
|
|
+
|
|
|
+$x`=\frac{n}{z}x,y`=\frac{n}{z}y$
|
|
|
+
|
|
|
+$$
|
|
|
+\begin{pmatrix}
|
|
|
+ x \\ y \\ z \\ 1
|
|
|
+\end{pmatrix}
|
|
|
+\Rightarrow
|
|
|
+\begin{pmatrix}
|
|
|
+ nx/x \\ ny/z \\ unknow \\ 1
|
|
|
+\end{pmatrix} ==
|
|
|
+\begin{pmatrix}
|
|
|
+ nx \\ ny \\ still unknow \\ z
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+M^{(4\times4)}_{persp \rightarrow ortho}
|
|
|
+\begin{pmatrix}
|
|
|
+ x \\ y \\ z \\ 1
|
|
|
+\end{pmatrix} =
|
|
|
+\begin{pmatrix}
|
|
|
+ nx \\ ny \\ unknow \\ z
|
|
|
+\end{pmatrix}
|
|
|
+\Rightarrow
|
|
|
+M^{(4\times4)}_{persp \rightarrow ortho} =
|
|
|
+\begin{pmatrix}
|
|
|
+ n & 0 & 0 & 0 \\
|
|
|
+ 0 & n & 0 & 0 \\
|
|
|
+ ? & ? & ? & ? \\
|
|
|
+ 0 & 0 & 1 & 0
|
|
|
+\end{pmatrix}
|
|
|
+$$
|
|
|
+
|
|
|
+> 透视变换矩阵最后一行完全可以是(0 0 0 z),但是z是变量,到时候计算的时候还得实时带入z的真实值,对于计算机来说很麻烦,要开辟内存,还要传值,浪费资源
|
|
|
+
|
|
|
+- 此时带入观察到的两个细节
|
|
|
+ - 对近平面来说,(x, y, n, 1) (n表示近平面的z)与透视变换矩阵运算,其x、y、n值不变
|
|
|
+ - 对远平面来说,(x, y, f, 1) (f表示远平名的z)与透视变换矩阵运算,其f值不变
|
|
|
+ - 对远平面来说,(0, 0, f, 1) 与透视变换矩阵运算,其值不变,仍未(0, 0, f, 1)
|
|
|
+
|
|
|
+$$
|
|
|
+M^{(4\times4)}_{persp \rightarrow ortho}
|
|
|
+\begin{pmatrix}
|
|
|
+ x \\ y \\ n \\ 1
|
|
|
+\end{pmatrix} =
|
|
|
+\begin{pmatrix}
|
|
|
+ x \\ y \\ n \\ 1
|
|
|
+\end{pmatrix} ==
|
|
|
+\begin{pmatrix}
|
|
|
+ nx \\ ny \\ n^2 \\ n
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+设M^{(4\times4)}_{persp \rightarrow ortho}第三行为
|
|
|
+\begin{pmatrix}
|
|
|
+ A & B & C & D
|
|
|
+\end{pmatrix}
|
|
|
+带入上述式子的计算中得
|
|
|
+\begin{pmatrix}
|
|
|
+ A & B & C & D
|
|
|
+\end{pmatrix}
|
|
|
+\begin{pmatrix}
|
|
|
+ x \\ y \\ n \\ 1
|
|
|
+\end{pmatrix} = n^2
|
|
|
+\\
|
|
|
+得到A=0, B=0, C*n + B = n^2
|
|
|
+\\
|
|
|
+M^{(4\times4)}_{persp \rightarrow ortho}
|
|
|
+\begin{pmatrix}
|
|
|
+ 0 \\ 0 \\ f \\ 1
|
|
|
+\end{pmatrix} =
|
|
|
+\begin{pmatrix}
|
|
|
+ 0 \\ 0 \\ f \\ 1
|
|
|
+\end{pmatrix} ==
|
|
|
+\begin{pmatrix}
|
|
|
+ 0 \\ 0 \\ f^2 \\ f
|
|
|
+\end{pmatrix}
|
|
|
+\\
|
|
|
+带入前面推理(0, 0, C, D)式子中,得到 Cf + D = f^2
|
|
|
+\\
|
|
|
+\begin{matrix}
|
|
|
+ Cn + D = n^2 \\
|
|
|
+ Cf + D = f^2
|
|
|
+\end{matrix}
|
|
|
+\Longrightarrow
|
|
|
+\begin{matrix}
|
|
|
+ C = n + f \\
|
|
|
+ D = -nf
|
|
|
+\end{matrix}
|
|
|
+\\
|
|
|
+M^{(4\times4)}_{persp \rightarrow ortho} =
|
|
|
+\begin{pmatrix}
|
|
|
+ n & 0 & 0 & 0 \\
|
|
|
+ 0 & n & 0 & 0 \\
|
|
|
+ 0 & 0 & n + f & -nf \\
|
|
|
+ 0 & 0 & 1 & 0
|
|
|
+\end{pmatrix}
|
|
|
+$$
|
|
|
|
|
|
+将得到的矩阵与(x,y,z,1)相乘后z的值等于(-nf)*z^(-1)+(n+f),是个反比例函数,这个图像恒过(n,n)与(f,f),在n与f之间,z是下凹的,所以z变小了,即再f与n平面之间的点的z是会变小的
|
|
|
|
|
|
# 光栅化
|
|
|
|


{kind=link}
{kind=link}

{kind=link}
{kind=link}
{kind=link}

{kind=link}

{kind=link}