|
|
@@ -171,6 +171,114 @@ bool JPSPathPlanner::_forceNeighborDetect(int dir, int cur_id, std::vector<int>&
|
|
|
- 如果 **当前节点** 的 **左节点** 是 **障碍物**,那么 **当前节点** 的 **左上角** 节点是 **强制邻居**
|
|
|
- 如果 **当前节点** 的 **下节点** 是 **障碍物**,那么 **当前节点** 的 **右下角** 节点是 **强制邻居**
|
|
|
|
|
|
-注意,需要判断 **强制邻居** 不能是 **障碍物**
|
|
|
+> 注意,需要判断 **强制邻居** 不能是 **障碍物**
|
|
|
+
|
|
|
+如果是斜向时,强制邻居的 id 是 `cur_id + 2 * delta_obs[i] + dir`,仍然以上述情况为例子
|
|
|
+
|
|
|
+移动方向是 **右上角**,**当前节点** 的 **左节点** 是 **障碍物**,那么 **当前节点** 的 **左上角** 节点是 **强制邻居**
|
|
|
+
|
|
|
+此时 `delta_obs[i]` 表示 左方向, cur_id + 左方向 * 2 + 右上 得到的就是 左上角
|
|
|
+
|
|
|
+### _checkStraightLine 和 _checkSlashLine
|
|
|
+
|
|
|
+> _checkStraightLine 检查所有 竖直 或者 水平 方向
|
|
|
+> _checkSlashLine 检查所有 斜向
|
|
|
+
|
|
|
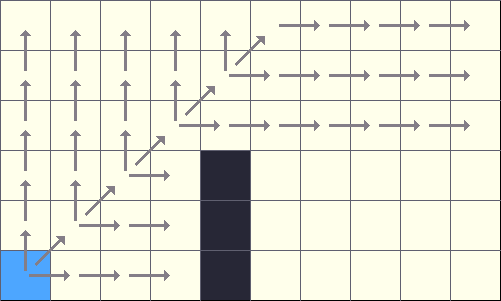
+JPS 查询一个点,是先查询这个点的斜向
|
|
|
+
|
|
|
+比如样例代码中,先查询起点的 左上方向 和 右下方向,再查询 左下方向 和 右上方向
|
|
|
+
|
|
|
+```cpp
|
|
|
+// initialization
|
|
|
+for (int i = 4; i < 6; i++)
|
|
|
+{ // explore left-top and right-bottom from current
|
|
|
+ _checkSlashLine(dirs_[i], start_, open_list_);
|
|
|
+}
|
|
|
+for (int i = 6; i < 8; i++)
|
|
|
+{ // explore left-bottom and right-top from next
|
|
|
+ _checkSlashLine(dirs_[i], start_, open_list_, false);
|
|
|
+}
|
|
|
+```
|
|
|
+
|
|
|
+在斜向查询的时候,会分解斜向向量,比如如果是 右上方向查询,会将查询区分为 右 和 上 两个方向,并一直查询下去,直到遇到 **障碍物**、**终点**、**强制邻居**
|
|
|
|
|
|
-### _checkStraightLine
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+> 先查找当前点 **上方向** 所有点,再查询 **右方向** 所有点
|
|
|
+
|
|
|
+当 当前节点 的 右方向 和 上方向 全部遍历完毕之后,沿着当前节点的 右上角 移动,再判断新节点的 右方向 和 上方向 全部节点
|
|
|
+
|
|
|
+### _jump
|
|
|
+
|
|
|
+因为 `_checkStraightLine` 和 `_checkSlashLine` 遍历节点时,遇到 **强制邻居** 就会停止搜索,导致后续节点可能没有搜索完毕
|
|
|
+
|
|
|
+通过 parent_Id 和自己的 ID,沿着未搜索完的方向继续搜索
|
|
|
+
|
|
|
+```cpp
|
|
|
+int dir = calDir(node.id(), node.pid());
|
|
|
+if (dir == 1 || dir == -1 || dir == nx_ || dir == -nx_)
|
|
|
+{
|
|
|
+ _checkStraightLine(dir, node, open_list);
|
|
|
+}
|
|
|
+else
|
|
|
+{
|
|
|
+ _checkSlashLine(dir, node, open_list);
|
|
|
+}
|
|
|
+```
|
|
|
+
|
|
|
+然后沿着 强制邻居 方向继续搜索
|
|
|
+
|
|
|
+```cpp
|
|
|
+if (node.fid() != -1)
|
|
|
+{
|
|
|
+ int f_dir = calDir(node.fid(), node.id());
|
|
|
+ _checkSlashLine(f_dir, node, open_list, false);
|
|
|
+}
|
|
|
+```
|
|
|
+
|
|
|
+这 `_jump` 函数中,仍然会向 `open_list` 中添加新的节点
|
|
|
+
|
|
|
+### plan
|
|
|
+
|
|
|
+首先从 `start_` 起点开始,初始化 `open_list_` 的内容
|
|
|
+
|
|
|
+```cpp
|
|
|
+// initialization
|
|
|
+for (int i = 4; i < 6; i++)
|
|
|
+{ // explore left-top and right-bottom from current
|
|
|
+ _checkSlashLine(dirs_[i], start_, open_list_);
|
|
|
+}
|
|
|
+for (int i = 6; i < 8; i++)
|
|
|
+{ // explore left-bottom and right-top from next
|
|
|
+ _checkSlashLine(dirs_[i], start_, open_list_, false);
|
|
|
+}
|
|
|
+```
|
|
|
+
|
|
|
+然后对 `open_list_` 进行遍历,通过 `_jump` 对跳点进行处理
|
|
|
+
|
|
|
+```cpp
|
|
|
+while (!open_list_.empty())
|
|
|
+{
|
|
|
+ // pop current node from open list
|
|
|
+ auto current = open_list_.top();
|
|
|
+ open_list_.pop();
|
|
|
+
|
|
|
+ // current node do not exist in closed list
|
|
|
+ if (closed_list_.find(current.id()) != closed_list_.end())
|
|
|
+ continue;
|
|
|
+
|
|
|
+ closed_list_.insert(std::make_pair(current.id(), current));
|
|
|
+ expand.emplace_back(current.x(), current.y());
|
|
|
+
|
|
|
+ // goal found
|
|
|
+ if (current == goal_)
|
|
|
+ {
|
|
|
+ // 找到目标点
|
|
|
+ }
|
|
|
+
|
|
|
+ // 对跳点进行处理
|
|
|
+ _jump(current, open_list_);
|
|
|
+}
|
|
|
+```
|

 NiceTry12138
NiceTry12138
{kind=link}